

Bridge inspection is one of the most labor-intensive and dangerous tasks in global civil infrastructure maintenance. In GPS-denied blind spots such as elevated box girders, pier caps, and bridge bottom culverts, traditional manual inspection faces long-standing challenges of high operational risk, numerous visual dead angles, and low efficiency. A recent study led by Zhejiang University in collaboration with Hangzhou Dianzi University and other teams proposes QRIVAS (Quadruped Robot Intelligent Visual Acquisition System), enabling robots to autonomously explore, accurately identify, and achieve full-coverage image acquisition of key bridge components without relying on any maps or prior environmental information. The navigation success rate reaches 100% in simulation environments, and the average task navigation success rate in actual bridge component inspections is 96.7%.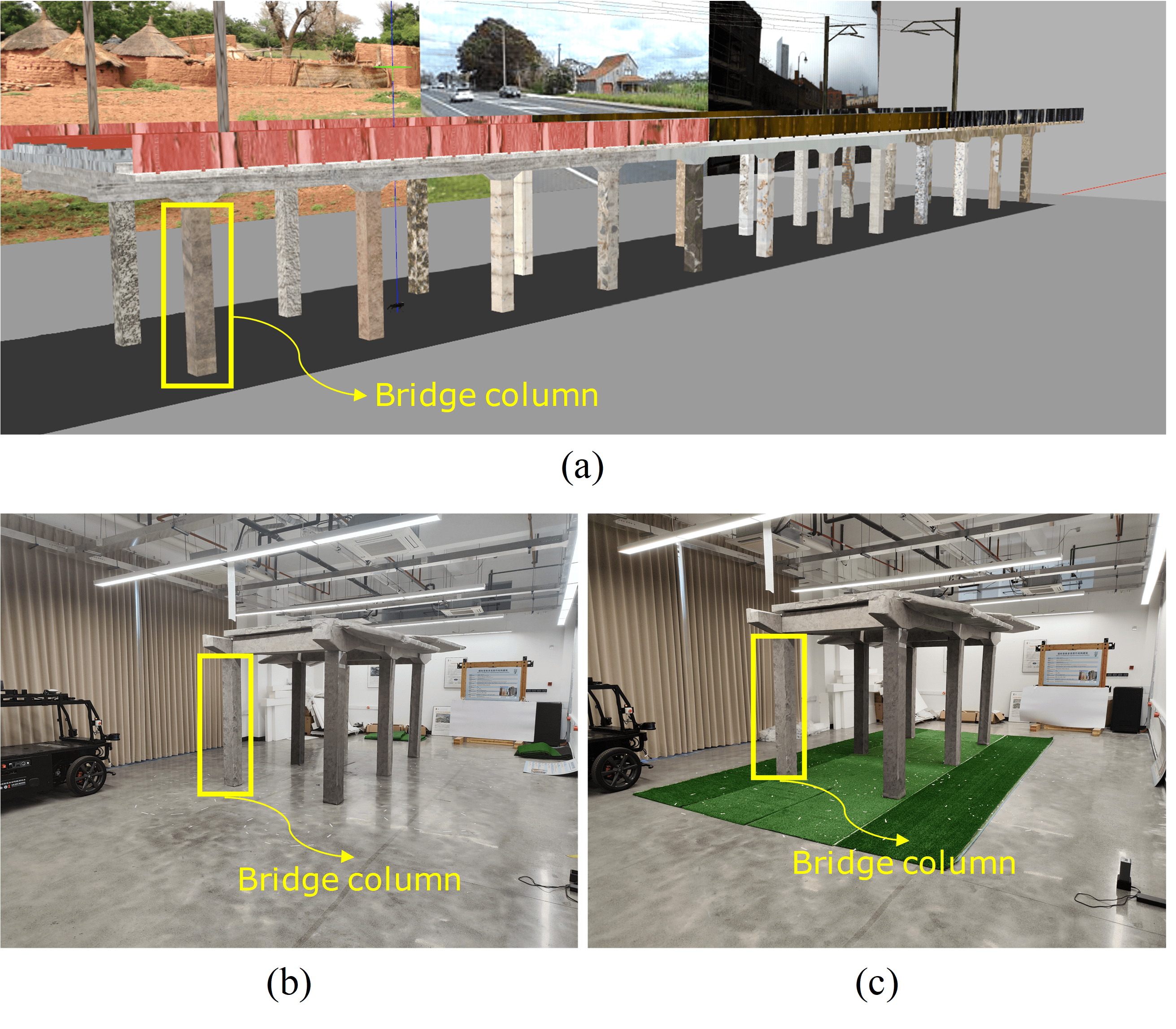
The "Blind Spot Dilemma" of Bridge Inspection
Bridges are critical nodes in transportation systems, and their structural health monitoring directly impacts public safety and engineering lifespan. Key components such as piers, cap beams, and beam bottoms are often located in GPS-denied areas like box girder interiors, pier bases, or underground culverts, lacking texture features and stable lighting. Traditional manual inspection requires scaffolding, aerial work platforms, or even climbing operations, posing significant safety hazards. For example, a single manual inspection of an approximately 11-kilometer-long tunnel takes nearly 22 hours. Meanwhile, drones struggle to operate stably under bridges and in confined spaces due to GPS loss and turbulent airflow.
Existing robotic inspection solutions mostly rely on pre-built high-precision maps. However, in unknown environments lacking prior information (e.g., first-time inspection of newly built bridges or emergency post-disaster inspections), pre-mapping is extremely costly, time-consuming, or even impossible. Therefore, achieving autonomous navigation and high-precision visual acquisition under extreme conditions—no maps, no GPS, weak textures, and low illumination—has become a core challenge at the intersection of civil engineering and robotics.
When Quadruped Robots Learn to "Feel Their Way in the Dark"
On May 20, 2026, Zhejiang University, in collaboration with Hangzhou Dianzi University, Shanghai Jianke Testing Co., Ltd., and other institutions, published research in the Journal of Field Robotics, introducing QRIVAS—a quadruped robot autonomous framework integrating 3D LiDAR SLAM and real-time semantic segmentation. Without relying on prior maps, the system achieves autonomous exploration, precise identification, and full-coverage image acquisition of key bridge components, filling a technical gap in autonomous navigation under extreme environments for intelligent civil engineering inspection.
Highlight 1: 3D LiDAR SLAM Enables Autonomous Navigation and Mapping
The research team equipped the quadruped robot platform with an Ouster OS1-64 LiDAR. Using 3D LiDAR SLAM (Simultaneous Localization and Mapping) technology, the robot perceives its surroundings in real-time in GPS-denied, low-texture environments, simultaneously constructing high-precision 3D point cloud maps and calculating its own pose. This marks the first time a quadruped robot has deeply integrated SLAM navigation with semantic recognition in a civil engineering context, overcoming localization drift bottlenecks caused by weak textures and low lighting in confined spaces like box girder interiors.
Highlight 2: Real-Time Semantic Segmentation Enables Robots to "Understand" Bridge Piers
During real-time navigation, the team deployed an efficient, lightweight real-time semantic segmentation network to perform pixel-level semantic labeling of key components such as piers, cap beams, and beam bottoms in LiDAR point clouds. QRIVAS deeply couples navigation path planning with component identification, enabling the robot not only to "know where it is" but also to "know what to capture" and "from which angle to capture it."
This design allows the robot to dynamically adjust its observation posture while exploring unknown environments, ensuring multi-view, full-coverage imaging of target components, thus avoiding the chronic issue of blind spots in traditional fixed-path inspections caused by complex component shapes.
Highlight 3: Autonomous Task Decomposition Without Prior Maps
The core breakthrough of QRIVAS lies in completely eliminating reliance on prior maps. The system decomposes the complex bridge component inspection task into three autonomously executed sub-tasks: spatial exploration (the robot autonomously plans coverage paths in unknown areas), component identification (locating target component positions and orientations based on semantic segmentation results), and information acquisition (automatically adjusting stance and posture to capture image data of key component areas). The robot builds maps simultaneously while performing tasks, requiring no manual intervention or pre-set trajectories.
Highlight 4: High Robustness Under Extreme Terrain and Stringent Tolerances
The team validated the system in a simulated concrete railway viaduct environment and a scaled (1:3) physical pier model. The experimental results are landmark: in the simulation environment, QRIVAS achieved a 100% autonomous navigation success rate; on the real pier model, during repeated inspections of six independent piers, the average task navigation success rate reached 96.7%.
Critically, the system remained stable under two extreme operating conditions: first, on flat concrete ground, its robustness was rigorously tested with allowable navigation tolerance radii of 25 cm and 50 cm, outperforming existing technical solutions; second, it successfully completed all autonomous inspections on rough artificial turf—a typical soft, uneven terrain—demonstrating the quadruped robot's exceptional terrain adaptability.
From "Humans Entering Dead Ends" to "Robots Entering Dead Ends"
The technical difficulty of bridge inspection is not just "seeing clearly," but also "getting in" and "capturing accurately." The complex environment at the junction of pier bases and the ground, along with extremely confined spaces in abutment areas, have long constrained the development of automated inspection.
QRIVAS's technical approach, through an integrated design of collaborative robot perception and decision-making, achieves a closed loop of "action equals mapping, mapping equals decision-making": with each step the robot takes, real-time LiDAR scan data flows into the SLAM module to update the local map; the semantic segmentation module identifies target components from the map; the path planning module adjusts the next observation angle and foothold accordingly. This real-time, task-driven decision mechanism enables QRIVAS to complete full-coverage inspections in environments with zero prior information, providing a reusable system framework for "autonomous exploration in unknown environments" in civil engineering.
Starting from Bridge Piers, Covering Full Bridge Inspection and the Entire Infrastructure Spectrum
1. Breaking Through Traditional Inspection Dead Zones, Achieving "Zero Dead Angle" Detection of Piers and Box Girders
Inspecting box girders and pier bottom spaces is the most difficult and dangerous. The successful validation of QRIVAS brings automated solutions for these two most challenging component inspections. The robot can penetrate narrow cavities of elevated box girders, autonomously mapping, localizing, and capturing beam bottom images in completely dark, textureless interiors, thoroughly replacing traditional manual high-altitude operations.
2. From "Single Robot Inspection" to "Swarm Coordination": An Air-Ground Integrated Intelligent Inspection System
QRIVAS perfectly complements drone inspection. Under-bridge spaces and confined cavities inaccessible to drones are handled by the quadruped robot for detailed inspection; drones are responsible for rapidly establishing a macroscopic 3D map of the bridge, providing global navigation information for the robot. Their coordination can form a comprehensive, dead-angle-free intelligent inspection system for large bridges, from macro to micro scales.
3. Disaster Emergency Response: Immediate Deployment in Inaccessible Post-Earthquake Bridge Areas
In extreme scenarios like earthquakes or floods, bridges are damaged with unknown structural conditions, making human entry highly risky. QRIVAS's map-free autonomous capability holds unique value in post-disaster emergency scenarios, allowing immediate deployment in completely unfamiliar rescue environments to rapidly capture and transmit structural damage images, providing critical first-hand information for emergency repair decisions.
4. Technology Transfer: Full Coverage from Bridges to Tunnels, Underground Utility Tunnels, and Super-Tall Buildings
The core technical framework of this system (3D LiDAR SLAM + real-time semantic segmentation + autonomous task decomposition) possesses strong cross-scenario transferability. In tunnel inspection, the quadruped robot can autonomously navigate long, GPS-denied tunnels to capture lining images; in urban underground utility tunnels (e.g., the "underground city" information utility tunnels in Xiong'an New Area), it can complete full autonomous inspections in signal-denied, lightless spaces; it can also perform equivalent tasks in confined spaces like elevated tower columns and large storage tanks, significantly expanding the application boundaries of drone and robot inspection.
From "Dangerous Humans" to "Smart Dogs"
The deeper value of this research lies in redefining the automation paradigm for civil engineering inspection. Since the advent of modern bridge engineering, "erecting scaffolding," "climbing heights," and "crawling into tight spaces" have been unavoidable costs of structural inspection. The successful validation of QRIVAS proves that under the four harshest conditions—no maps, no GPS, weak textures, and low illumination—quadruped robots can still independently complete high-quality inspection tasks. This marks a critical step in the historic transition of civil engineering inspection from a "human-centered" to an "intelligent robot-centered" paradigm.