

A study led by the University of Surrey, published in Nature Machine Intelligence, brings a major breakthrough in robotic grasping and object manipulation. The research demonstrates that a novel anti-slip method significantly enhances a robot's ability to grasp and handle fragile, slippery, or irregularly shaped objects, laying the foundation for safer and more reliable automation across industries such as manufacturing and healthcare.
Researchers from the University of Surrey's School of Computer Science and Electronic Engineering showcased their innovative approach: enabling robots to predict when an object is about to slip — just like humans do — and adjust their actions in real time to prevent it. This biomimetic strategy outperforms traditional force-based gripping methods, allowing robots to move more intelligently and maintain a secure hold without simply squeezing harder.
Conventionally, robots are trained solely on grip force, which can be ineffective — or even damaging — when handling delicate items. With the new method, robots can instinctively adapt their movements in the same way a human adjusts their hand when a plate starts to slip, ensuring the object remains safe.
Dr. Amir Esfahani, Associate Professor in Robotics, stated that this development could transform the future of automation. Potential applications include handling surgical instruments in healthcare, assembling precision components in manufacturing, sorting bulky packages in logistics, and assisting people with daily living tasks at home.
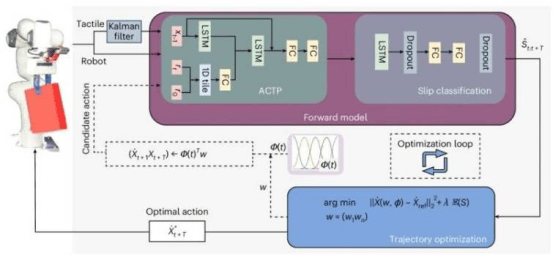
The research was conducted in collaboration with the University of Lincoln, Arizona State University, the Korea Advanced Institute of Science and Technology (KAIST), and Toshiba Europe Cambridge Research Laboratory. It is the first to demonstrate and quantify the effectiveness of trajectory adaptation for slip prevention in both humans and robots. The results show that a predictive control system driven by a learned “tactile forward model” enables the robot to anticipate slip events and continuously analyze planned motions.
Furthermore, the researchers confirmed that the system can handle untrained objects and novel motion paths, highlighting its strong potential for generalization in real-world environments. Dr. Amir Esfahani emphasized that the method holds significant promise for a wide range of industrial and service robot applications, opening new opportunities for robots to integrate seamlessly into everyday life. He expressed hope that these findings will inspire future research and further advance the field of robotics.