

A research team at Pohang University of Science and Technology (POSTECH) has successfully developed a thin, lightweight, and flexible robotic actuator inspired by human muscle proteins. The related research was published in the journal Nature Communications.
Traditional robots are mostly made of rigid metal components. While they possess strength, their ability to perform delicate movements and operate in narrow environments is limited. The newly developed robotic actuator is as thin as paper yet can generate powerful force, allowing it to move flexibly and manipulate objects in confined spaces. It is suitable for various applications such as surgical robots and industrial equipment.
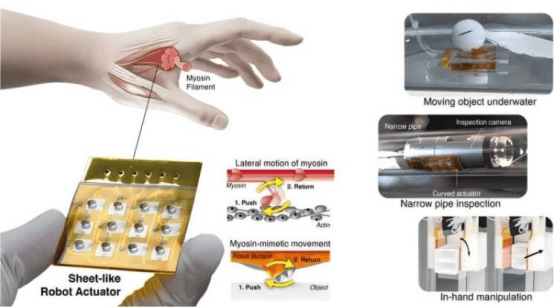
The team consists of Dr. Hyung Gon Shin from Samsung Electronics' Future Robotics Division (former postdoctoral researcher at POSTECH) and Professors Keehoon Kim and Wan Kyun Chung from the Department of Mechanical Engineering at POSTECH. Drawing inspiration from human muscle movement, they mimicked the function of myosin, which generates large movements through repeated small contractions, and developed a thin-sheet pneumatic actuator. Although this actuator appears to be a simple thin sheet, it contains dozens of small air chambers and multi-layer, multi-channel air paths inside. When air is sequentially injected into the sheet, the surface protrusions move in multiple directions, accumulating small forces to produce larger movements. It can crawl like a caterpillar when bending and can move in six directions: up, down, left, right, and rotation, while also flexibly controlling speed and distance.
The research team verified the technology's performance through a series of experiments. In object manipulation tests, the robot's movement precision was comparable to that of human fingers. It also successfully completed underwater object movement tasks and could perform tasks that traditional robots struggle with, such as cleaning narrow pipes. In addition, the team developed a mathematical model to predict the robot's motion, laying the foundation for future diversified designs and applications.
This research is expected to bring innovative changes to daily life and industrial fields. In the medical field, robots can navigate through tiny openings to assist in precise surgery. In industrial environments, they can perform inspection tasks in enclosed spaces. When applied to household cleaning and caregiving robots, they can interact with humans in a more delicate and sensitive manner.
Professor Keehoon Kim stated that the study successfully integrated complex three-dimensional pneumatic networks into a thin and flexible structure, achieving multi-directional movement through a biomimetic approach. He hopes this technology can be applied to various fields such as surgical robots, industrial collaborative robots, and environmental exploration.