

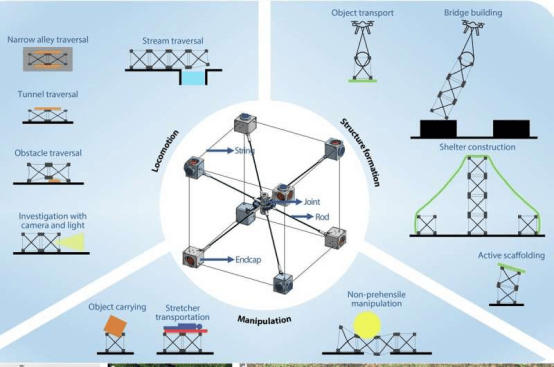
Modular robots developed by Dartmouth College researchers are being applied in outdoor scenarios. These robots are assembled from cube-shaped robotic blocks composed of rigid rods and soft, elastic ropes. By adjusting the tension of the ropes, the blocks can deform and change shape, allowing them to be assembled into the most suitable structures according to actual tasks.
"Modular robots are highly versatile; different combinations of modules enable them to perform different tasks," said Luyang Zhao, a member of the Class of 2025 at Guarini, who developed these robots in collaboration with colleagues from Dartmouth’s Reality and Robotics Lab, Rutgers University, and Yale University.
Zhao and his fellow graduate student Yitao Jiang from the Department of Computer Science at Guarini tested the robotic modules near campus. These robots can navigate various outdoor spaces, crawl under fallen logs, squeeze through narrow gaps, and work together to build temporary tent scaffolding. With the assistance of drones, they can locate and "rescue" fallen companions.
Inspired by the way ants connect with each other to fill gaps along their path, the researchers demonstrated how a line of connected modules can form a bridge over a narrow stream and even transport light objects. Zhao and Jiang used wooden boards and short wooden blocks to create a stretcher capable of carrying a human mannequin. Although the robots currently cannot support the weight of a human, the researchers believe this may be achievable in the future.
Professor Zhao said that these robots are lightweight, easy to deploy, and durable. They can be air-dropped anywhere and quickly assembled into bridges or temporary shelters, playing an effective role in emergency disaster relief.
In a recent paper published in Nature Communications, the researchers described the design and functions of the modular robotic blocks. Each module has eight rigid rods extending outward from a 3D-printed center. The center contains a battery that powers the robot and a Wi-Fi module for communication. A fully charged block can "walk" for more than three hours. The ends of the rods are connected by ropes to end caps. Motors on the end caps can change the length of the ropes and the shape of the block, and can also activate latches on the end caps to connect the blocks to each other.
Devon Balkcom, professor of computer science and lead researcher of the study, said that small deformations in individual robots can produce large movements in the entire system. The assembly units cleverly combine structure and motion. The team used drones to build 3D structures, changing the landscape of construction. It is relatively easy for ground-connected modules to link up, but it is difficult for them to climb on each other to build taller structures. Drone deployment is similar to 3D printing and can repeatedly configure modules to build tall structures.
Professor Zhao, who recently joined Clemson University as an assistant professor, said this is the first time modular robots have demonstrated such rich functionality in outdoor environments, but there is still much work to be done, such as improving load-bearing capacity and adding sensors so that the robots can perceive and respond to the environment more autonomously.