

Assistant Professor Mihai “Mishu” Duduta from the Department of Mechanical, Aerospace, and Manufacturing Engineering at the School of Engineering, along with his graduate student team, published research in the July issue of npj Robotics, introducing a fully soft robotic system named RoboNautilus, bringing an innovative breakthrough to the field of underwater propulsion.
RoboNautilus draws inspiration from the jet propulsion mechanism of cephalopods. As the only natural swimmers that utilize pulsed jet propulsion, cephalopods rely on rhythmic expansion and contraction of their soft mantle cavity to inhale and forcefully expel water, achieving highly efficient and agile movement. However, due to limitations of soft actuators, replicating this mechanism in robotics has been challenging, with most solutions relying on rigid motors or bulky hydraulic systems.
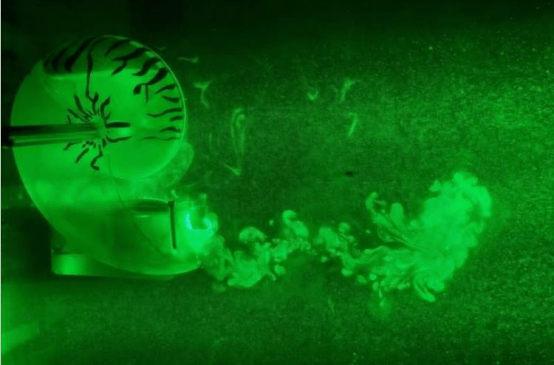
RoboNautilus breaks with tradition as a fully integrated, autonomous underwater robot. It uses multilayer dielectric elastomer actuators (DEA) to drive water flow through soft siphon tubes for jet propulsion. The solid-state actuators deform under high pressure without any rigid components, combining control force, efficiency, and compact design. The robot’s shell is 3D-printed, modeled after the chambered nautilus (Nautilus belauensis), with an internal cavity restructured to house electronics and an air pocket for buoyancy and passive self-righting; a soft DEA membrane is installed at the front nozzle, which periodically expands and contracts when energized to draw in and expel water, generating thrust.
Notably, the robot’s design is also closely tied to history. Its inspiration traces back to the USS Nautilus, the world’s first nuclear-powered submarine, built in Connecticut in 1955. Professor Duduta holds deep respect for Admiral Hyman G. Rickover, who led the construction of the Nautilus, and draws leadership and team-building insights from his teachings.
Beyond outstanding propulsion performance, RoboNautilus holds great potential for environmental monitoring. It is equipped with a built-in camera as well as temperature and salinity sensors for shallow-water testing, enabling the collection of critical data in fragile marine ecosystems without disturbing surrounding organisms—a major advantage over rigid robots.
In the future, RoboNautilus will continue to iterate and upgrade, potentially incorporating thrust vectoring, autonomous navigation, and more advanced sensing capabilities. Its use of soft materials, onboard power, and quiet jet-like motion opens a new direction for low-impact underwater explorers in research, monitoring, and conservation.
Additionally, Professor Duduta plans to host an outreach event this fall in Barrington, Rhode Island, where high school students will participate in crowdsourced shell design activities, engaging young students in the research and connecting ancient biology with modern robotics.