

A research team from the Ningbo Institute of Materials Technology and Engineering (NIMTE) of the Chinese Academy of Sciences has developed a new method to enhance the efficiency of industrial robot dynamics modeling, addressing long-standing bottlenecks in real-time torque computation.
The research results were published in the IEEE Transactions on Industrial Informatics. The proposed approach introduces a novel method to overcome the inefficiency of traditional dynamic models.
Industrial robots rely on Linear-in-Parameter (LIP) dynamic models for torque computation and online dynamic parameter identification—tasks critical for adaptive control and robot-environment interaction. However, these models are often hindered by redundant terms in Multivariate Polynomials (MVP), which slow down computation and limit real-time applications.
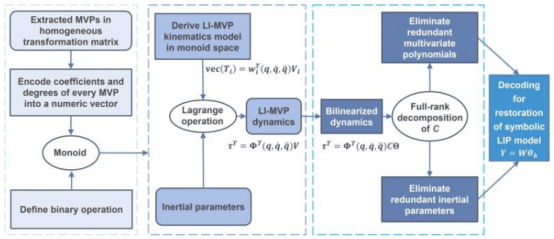
To address this issue, the researchers proposed a Linear-Inverse Multivariate Polynomial (LI-MVP) dynamics model framework. This framework encodes coefficients and polynomial degrees as numerical matrices, simplifying the dynamic modeling process and improving efficiency.
A key innovation lies in replacing cumbersome symbolic Kronecker products with a binary operation defined within a monoid, accelerating the derivation of LI-MVP models in the encoded space.
Corresponding author Professor Chen Silu stated: “Our method simplifies model derivation and accelerates real-time torque computation by simultaneously eliminating redundant MVP terms and parameters.”
The final symbolic LIP model recovers the MVP in Horner form for decoding, reducing the number of multiplications required for torque computation.
Quantitative analysis confirms that the new method is more efficient in model derivation compared to existing approaches. The researchers indicate that it also demonstrates great potential for model-based real-time control of industrial robots. This advancement means improved flexibility and responsiveness in robotic systems.