

A team of engineers at Northwestern University has achieved a major breakthrough in robotics by developing soft artificial muscles, paving the way for more flexible and adaptable robots. The related research was published in Advanced Materials on July 24.
Most current robots are rigid and heavy, making it difficult for them to adapt to complex environments or perform delicate tasks. The novel artificial muscles (actuators) developed by the Northwestern University team possess the performance and mechanical properties required to build robotic musculoskeletal systems.
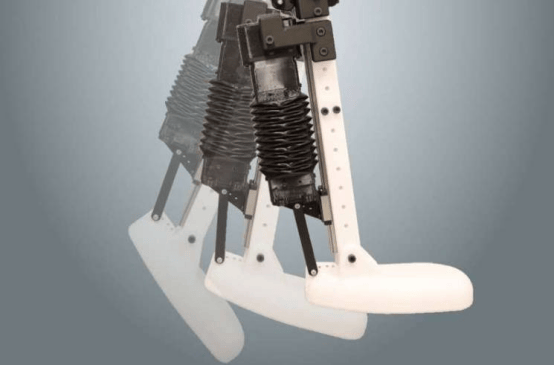
To demonstrate its functionality, the team implanted the artificial muscles into a human-scale bionic leg. The leg is equipped with rigid plastic "bones," elastic "tendons," and sensors, and uses three artificial muscles—quadriceps, hamstrings, and calf muscles—to bend the knee and ankle joints. It offers excellent flexibility, absorbs impact forces, and can exert sufficient power to kick a volleyball off a pedestal.
Creating soft actuators that function like real muscles poses numerous challenges. Most existing soft actuators require large, heavy equipment for actuation, lack durability, and offer insufficient force. Designing soft materials that operate like muscles is extremely difficult; even if movement is achieved, issues such as energy transmission and connection to rigid structures quickly arise.
To overcome these challenges, the team drew inspiration from their previously developed "helical shear auxetic" (HSA) actuators. The core of the actuator is a 3D-printed cylindrical structure, with the twisting motion required for movement generated by a small integrated electric motor. Team member Tae Yong Kim developed a method to 3D-print HSA using inexpensive rubber and encapsulated it within a rubber origami bellows structure, allowing the actuator to push and pull like artificial muscle while dynamically stiffening under load. Each muscle weighs about the size of a soccer ball and is slightly larger than a soda can; it can extend up to 30% of its length, contract and lift objects 17 times its own weight, and is battery-powered.
To showcase the practical application potential of the artificial muscles, the team built a human-scale robotic leg. The leg uses rigid plastic for the "skeleton," rubber connectors similar to tendons, and flexible 3D-printed sensors that allow the leg to "sense" its own muscles. The final prosthetic leg is compact, battery-powered, and can bend the knee thousands of times on a single charge within one hour.
Senior author Ryan Truby stated: "By designing new robotic materials that possess the performance and characteristics of biological musculoskeletal systems, we can create more resilient, robust, and durable robots that meet real-world demands." This innovation has the potential to transform how robots walk, run, interact with humans, and explore the world, advancing humanoid and animal-like robots in new directions.