

A research team led by Professor Jung Kim from the Department of Mechanical Engineering at the Korea Advanced Institute of Science and Technology (KAIST) has achieved a significant scientific breakthrough by successfully developing a flexible robotic sheet. The results have been published in the journal Nature Communications.
In many fields, designing deformable robots is of great significance, as they can enable applications such as environmental exploration and object manipulation. Although traditional origami-like folding and deformation methods are well-established, the fixed hinge structures limit their configuration range and adaptability.
The robotic folding sheet designed by the Korean research team is unique. It consists of densely distributed thermally sensitive electronic components that can change shape when heated. The research team demonstrated the technology using a 40-square-centimeter thin sheet composed of 308 resistors. These resistors serve dual functions as both heaters and sensors, enabling precise motion control. The system can continuously adjust based on feedback from its own sensors.
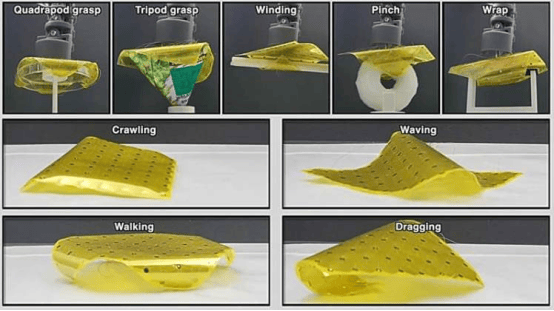
In experiments, the robotic sheet demonstrated its flexibility by crawling on surfaces and grasping, lifting, and manipulating objects such as petri dishes, plastic packaging, and wooden sticks. In addition, the system can achieve folding angles from -87° to 109°, maintains stable performance across a temperature range of 30°C to 170°C, and can respond quickly and precisely to environmental changes, thereby improving stability and efficiency.
The research team believes that this programmable folding sheet can enhance the multifunctionality and adaptability of autonomous systems, helping them operate more efficiently on unpredictable terrain. However, to fully unlock the potential of this technology, further advancements in materials science and structural design are still required.