

When Global Navigation Satellite System signals are completely interrupted, how can an underground mine Load-Haul-Dump (LHD) vehicle autonomously navigate through winding, narrow tunnels and swiftly pass through the dense operational zones between stopes and dumping points? For a long time, autonomous navigation for underground LHDs has relied on either Absolute Navigation (AN) or Reactive Navigation (RN). The former is prone to error accumulation during consecutive multiple turns, while the latter lacks global orientation capability on long straight sections. A joint team from Chongqing University, Central South University, Fuzhou University, and others has recently proposed a hybrid navigation strategy. This approach synergistically deploys the precise positioning of pre-built maps and the dynamic perception advantages of real-time sensors in both space and time, solving the deep-earth operational challenge of "not getting lost at turns and not drifting on straight paths" within a single framework for the first time.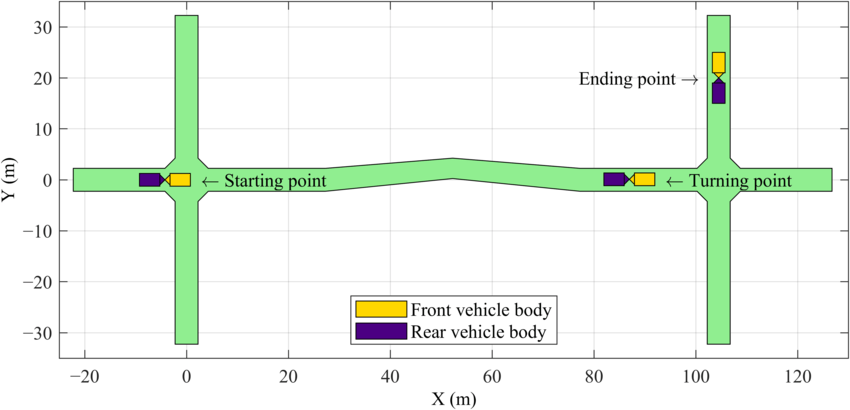
Absolute is precise, but prone to "drift"; Reactive is agile, but prone to "blindness"
The LHD is the core equipment for trackless mining in underground mines, responsible for loading ore from the stope and transporting it along the tunnels to the dumping point. Traditional manual operation faces risks from high dust, high humidity, noise, and even collapse, making the transition to autonomy extremely urgent.
In underground environments where GPS signals are completely blocked, there are currently two mainstream technical paths:
Absolute Navigation relies on LiDAR/Inertial Navigation Units combined with pre-built maps. It has clear advantages at tunnel turns, achieving centimeter-level precise positioning. However, the problem is that during long-term operation, disturbances like mechanical steering errors, wheel wear, and suspension settlement can easily lead to gradual error accumulation—when entering a narrow tunnel, the "overconfident" absolute positioning might cause the vehicle to scrape the sidewall or even get stuck in the tunnel.
Reactive Navigation is the opposite. It does not rely on pre-built maps but dynamically perceives the environment and adjusts instantly through real-time sensors (LiDAR, visual cameras, ultrasound). It is flexible and efficient on open straight sections, but when entering terrains with multiple forks or deep, winding roads, it is prone to "getting lost" due to the inability to obtain a global pose—choosing the wrong exit or even getting trapped in a loop dead zone.
The team of the paper's first author deeply analyzed this dilemma: "Absolute Navigation and Reactive Navigation each have their own advantages, but neither single path tracking nor pure real-time perception can fully cover the complex and variable underground environment." How to integrate both technologies on a single LHD and autonomously switch between them on different road sections has become the key bottleneck for LHD autonomous navigation moving from theory to engineering deployment.
Synergistic deployment, leveraging respective strengths—from "either-or" to "automatic switching"
On April 20, 2026, a joint research team from the School of Resources and Safety Engineering at Chongqing University, the School of Resources and Safety Engineering at Central South University, the Zijin School of Geology and Mining at Fuzhou University, and Shenzhen Zhongjin Lingnan Nonfemet Co., Ltd., published their research findings in the authoritative international robotics journal Journal of Field Robotics, proposing a hybrid navigation strategy for the first time. The core innovation of this strategy lies in the synergistic deployment of the advantages of Absolute Navigation and Reactive Navigation in both time and space.
Core Design: A spatiotemporal switching logic where "Absolute Navigation handles turns, and Reactive Navigation handles straight paths" achieves autonomous optimal mode selection. At tunnel turns, the system relies on pre-built maps for precise positioning, achieving reliable path tracking based on known environmental geometric features; once the turn is completed and the vehicle enters a long straight tunnel, the system automatically switches to Reactive Navigation, no longer depending on absolute positioning, and adjusts the trajectory instantly using only real-time LiDAR and odometry data. This achieves the effect of "using 'precision ammunition' only when necessary, and switching to 'low-power cruise' on stable road sections."
Experimental Verification: Simulation tests showed that this hybrid navigation significantly outperforms using AN or RN alone in terms of narrow-turn precision and straight-path robustness. Field stope tests further validated the system's stability under actual working conditions: the LHD could achieve a straight-line speed of about 1.8 m/s and a turning speed of 0.6 m/s in typical narrow tunnels, while maintaining stable operation under interference from high dust, low illumination, and multiple obstacles.
From a "single solution" to a "fusion architecture"—a paradigm shift in LHD autonomous navigation
The essence of this research is evolving the LHD navigation system from a fixed solution into a "road-adaptive" fusion architecture. At a deeper level, the HN strategy, by switching between navigation modules based on different principles for different road sections, forms a generalizable robust design scheme—even if one module experiences instantaneous performance degradation under extreme conditions like high dust, water accumulation, and multiple interference sources, the other module can take over to complete positioning or obstacle avoidance, ensuring the mission is not interrupted. In other words, HN does not simply retain two systems but allows them to cooperate in a relay over time, jointly eliminating the cumulative error of pure Absolute Navigation and the "getting lost" risk of pure Reactive Navigation.
The paper also points out that the strategy's characteristic of "not relying on absolute positioning" to independently adjust the trajectory on straight sections opens up new possibilities for future expansion. This leaves an interface for introducing lighter-weight lane-keeping algorithms or even distributed sensor-assisted solutions in long straight tunnels in the future—meaning HN not only solves current problems but also possesses an architectural foundation for continuous iteration and expansion. For actual mines, stably achieving the aforementioned speeds in a GPS-denied underground environment also means that LHDs possess the engineering capability to truly replace manual operations in critical processes like shift changes underground and stope transportation.
The underlying driver for deep mining
As China's mining depths continue to increase, tunnel curvature decreases, heat hazards and dust intensify, and communication attenuates. The risks and comfort challenges of traditional manual operation are continuously growing, making autonomous navigation a rigid demand for unmanned operations in steeply inclined deep stopes. The value of the hybrid navigation strategy lies precisely here—it does not rely on external positioning infrastructure like 5G or UWB, completing autonomous traversal solely with onboard sensors and pre-built maps. This is extremely friendly for deep mines with severe communication attenuation, and the deployment cost is far lower than alternatives requiring full-coverage positioning base station installation. Simultaneously, the "positioning + obstacle avoidance" redundancy capability provided by HN also offers a safety foundation for LHDs to collaborate with other low-profile vehicles in sensor-blind areas underground, bringing new safeguards to mixed underground operations.
In practical applications, as sensing and computing costs continue to decline, the LHD autonomous navigation solution based on the HN framework is also progressing from "being able to run" to "running stably, running long, and running safely."
Building a solid "foundation" capability for unmanned mines
The path planning, positioning accuracy, and operational robustness of LHDs are key links in the transition of underground mining automation from "single-machine demonstration" to "real deployment." The HN strategy provides a solution centered on "optimal principle adaptation," which is not limited to LHDs but can also be extended to other underground trackless equipment, constructing a "universal navigation baseplate" in deep mining environments characterized by GPS denial, multiple forked tunnels, and complex disturbance sources.
It can be said that the hybrid navigation strategy gives underground mine LHDs the dual confidence of "knowing where they are" and "knowing where to go" for the first time. This is not only a breakthrough from the "either-or" dilemma of underground autonomous navigation but also provides a robust, deployable, and scalable foundational technical solution for smart mines to leap from remote control to truly autonomous mining.