en.Wedoany.com Report on Mar 21st, Beijing's Shijingshan District recently welcomed a brand-new robotics training base — the Embodied Intelligence Tactile and Multimodal Perception Data Training Center. Constructed according to the principle of "gradient development," the facility has currently completed the layout of phases one, two, and three of the humanoid robot comprehensive training ground, with a total area exceeding 10,000 square meters, making it the largest robotics data training base in the country.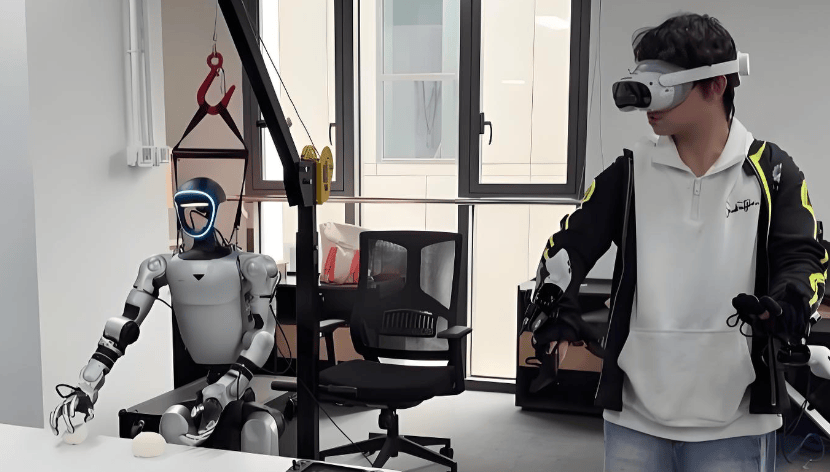
Inside this newly opened training center, various robots are learning and practicing in different scenarios. Unlike common visual recognition training, one of the key focuses here is enabling robots to master tactile perception. According to on-site staff, once robots possess tactile capabilities, their functions will no longer be limited to simple grasping and moving. For example, during the process of picking up an object, the robot can not only confirm the object's position visually but also sense through touch whether it has grasped the object and how firmly it is holding it, thereby placing the item steadily at the designated location.
The technical lead at the training center explained that the robots at the center can currently detect forces as small as 0.01 newtons, a level of precision equivalent to the pressure of a single strand of hair gently falling on a finger. With this level of force control capability, robots will be able to perform more delicate and complex operational tasks, such as precision assembly, medical assistance, and handling of flexible materials in challenging scenarios.
The enhancement of multimodal perception capabilities is a crucial step for humanoid robots moving from "seeing" to "doing." For a long time, robots' environmental perception has primarily relied on visual sensors. However, during physical interactions, the lack of tactile feedback can lead to unstable operations, object damage, or failed grasps. This center's focus on tactile perception training aims to address this shortcoming, enabling robots to interact with the physical world more naturally.
The operation of this center marks a new stage in the training capabilities of domestic humanoid robots in multimodal perception, particularly in the field of tactile perception. With the expansion of training scale and the deepening of data accumulation, domestically produced robots are expected to achieve further breakthroughs in fine manipulation capabilities.