

Currently, when robots are assigned specific tasks — such as placing cans on a conveyor belt in a factory — they can complete them efficiently. However, in less structured environments, even seemingly simple actions like unscrewing a light bulb or turning a doorknob become extremely challenging for robots when faced with a wide variety of tasks.
This difficulty is largely related to the "wrist" mechanism used by robots. Typically, robots designed to manipulate objects are equipped with a gripper and a wrist with three degrees of freedom (i.e., "roll" (forward-backward rotation), "pitch" (left-right), and "yaw" (vertical) — three independent movement modes). However, traditional wrist mechanisms are complex and bulky, positioned far from the grasped object, requiring the robot to move its entire arm to complete tasks. This results in clumsy and inefficient wrist movements, as well as occupying a large amount of space.
However, researchers at Yale University have brought an innovative breakthrough. Their research results, published in the journal Nature Machine Intelligence, have developed a simpler method to help robots perform complex actions.
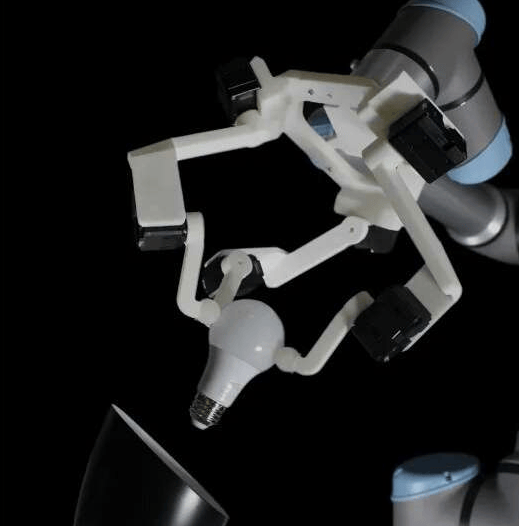
The robotic hand developed by Professor Aaron Dollar's laboratory at Yale University is named "Sphinx." It adopts a spherical mechanism with the ability to grasp various objects and rotate them on three axes, integrating many functions of a traditional wrist and gripper. Vatsal Patel, a PhD student in the Dollar Lab and first author of the paper, introduced that the "Sphinx" robotic hand is not complicated. It has no sensors on it and can operate normally without devices such as cameras. Thanks to its spherical structure, it can always achieve rolling, pitching, and yawing of objects.
The "Sphinx" robotic hand has significant advantages. It is more efficient, occupies less space, and allows the wrist to rotate closer to the object without needing to move the entire arm, resulting in faster operation and higher efficiency. This design also makes it easier for robots to perform tasks in confined spaces, such as tightening a light bulb inside a closet.
From a broader perspective, the "Sphinx" robotic hand brings the field of robotics closer to an increasingly common goal — designing robots that can work well in homes, disaster sites, and other unstructured environments. Patel said that in these environments, robots cannot know the exact location of objects and need to adapt to the environment and objects. This is exactly the direction of robotics development, and the Yale University team is also working hard to overcome this challenge. The development of the "Sphinx" robotic hand has undoubtedly injected new vitality into the development of robotics technology in the field of high-end equipment manufacturing and is expected to promote the expansion of robot application scenarios to a wider range of unstructured environments.