en.Wedoany.com Reported - Shanghai Weitai Robotics Co., Ltd., a Chinese visual-tactile robotics company, recently completed its Pre-A round of financing. This round was led by the Redbird Qihang Fund, with participation from industry investors including Lingyi Investment, Yongxin Ark, Wehao Chuangxin, Ningbo Jide, and others, co-invested by Shanghai Angel Association, with continued support from multiple existing shareholders. China Capital served as the exclusive financial advisor. The funds will be used for iterative advancements in visual-tactile sensing technology, actuator deployment, visual-tactile data collection and model closed-loop construction, expansion of the R&D team, and further exploration of overseas markets.
Weitai Robotics is an embodied intelligence company centered on visual-tactile sensing and hand-eye coordination. Its business focus is not solely on building robot bodies, but on constructing a technical system around end-effector perception, dexterous manipulation, and human-like operational capabilities. The core logic of visual-tactile technology involves capturing microscopic deformations on contact surfaces through visual imaging, then converting these deformations into tactile information that robots can understand. For humanoid robots, dexterous hands, and industrial grippers, this capability essentially equips machines with a "sense of touch" closer to that of human fingers.
The use of funds from this financing round directly targets the key stages of transitioning embodied intelligence from demonstrations to practical deployment. Visual-tactile sensing technology requires continuous improvements in precision, response speed, stability, and manufacturability; actuator deployment is crucial for sensors to be truly integrated into dexterous hands, grippers, and end-effector devices; the closed loop of visual-tactile data collection and modeling determines whether robots can convert "sensed data" into "operational capabilities." If these stages are not seamlessly connected, tactile sensors risk remaining confined to laboratories or isolated demonstrations, failing to enter real-world industrial tasks.
For robots to perform precision operations, relying solely on vision is insufficient. Vision can tell a robot where an object is, its shape, and its general surface condition. However, after contact occurs, determining whether there is slippage, excessive force, object deformation, or stable gripping often requires tactile feedback. For instance, when grasping flexible objects, tightening components, plugging in wire harnesses, handling fragile items, or assembling small parts, robots need real-time perception of contact states to decide whether to continue applying force, adjust posture, or stop the action.
The advantage of the visual-tactile approach lies in its high data density and its ease of integration with vision algorithms and multimodal models. Traditional tactile solutions may rely on piezoresistive, capacitive, piezoelectric, or magnetoelectric methods, which can sense force or pressure changes but have limitations in spatial resolution, cost, stability, and large-scale data collection. By converting tactile signals into image or image-like data, visual-tactile sensors can leverage computer vision and deep learning methods for processing, providing richer training samples for robot manipulation models.
Weitai Robotics has previously conducted R&D around vision-based tactile sensing technology, hand-eye coordination algorithms, and general-purpose human-like robot end-effector perception systems. Founded in January 2024, public information indicates that its technology originates from the Computer Science and Artificial Intelligence Laboratory at the Massachusetts Institute of Technology (MIT). The team focuses on high-performance visual-tactile sensors, hand-eye coordination algorithms, and robot end-effector manipulation capabilities. The founding team has long-term research experience in robotics, computer vision, and tactile sensing, with a technical direction highly aligned with the demand for high-quality physical interaction data in embodied intelligence.
Among the investors in this round, Redbird Qihang Fund, Lingyi Investment, Yongxin Ark, Wehao Chuangxin, and Ningbo Jide include both hard-tech investment institutions and industry-backed capital. The involvement of industry investors indicates that visual-tactile sensing technology is gaining attention from the broader manufacturing, semiconductor, robotics, and intelligent equipment ecosystem. For Weitai Robotics, industrial capital brings not only funding but also potential supply chain resources, manufacturing processes, customer scenarios, and overseas channel access, aiding its transition from an R&D-focused company to a product-delivery company.
Actuator deployment will be a key focus going forward. If visual-tactile sensors exist only as standalone modules, their commercial value is limited. Only by integrating with hardware such as dexterous hands, industrial grippers, collaborative robots, and humanoid robot end-effectors to form a complete "perception-decision-execution" closed loop can they enter customer procurement systems. Actuator deployment means sensors must withstand real-world operating conditions, including prolonged friction, contamination, temperature variations, repeated impacts, maintenance, replacement, and cost control.
Data collection and model closed-loop construction are equally critical. Embodied intelligence companies are competing for real-world physical data, and tactile data is currently one of the scarcest data types. Tactile signals generated during robot grasping, sliding, squeezing, contacting, and assembly can help models learn about object material, hardness, friction, deformation, and contact states. If Weitai Robotics can establish a stable visual-tactile data collection system and use this data for model training and product iteration, it has the opportunity to build a long-term technological moat.
Expanding into overseas markets is also an important direction following this financing round. High-performance tactile sensing and dexterous manipulation technologies serve not only the Chinese robotics market but also global research institutions, industrial automation companies, robot manufacturers, and medical rehabilitation equipment providers. Overseas customers have high requirements for sensor precision, interfaces, stability, and development documentation. Entering overseas markets can help Weitai Robotics validate its product standardization capabilities and enhance its technological influence in the global embodied intelligence perception segment.
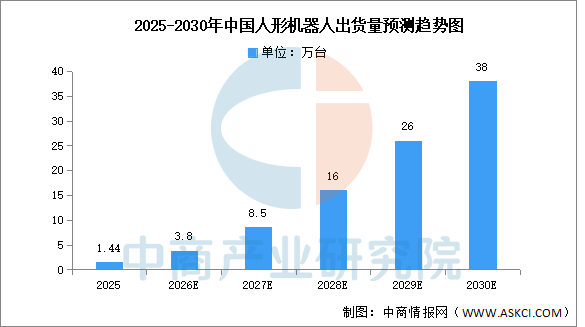
As humanoid robot competition shifts from locomotion capabilities to manipulation capabilities, touch is becoming a key variable in industrial deployment. Vision allows robots to "see the world," while touch enables them to "understand contact." Weitai Robotics' completion of its Pre-A round financing indicates that capital is increasing investment in the underlying perception layer of embodied intelligence. Whether the company can subsequently connect visual-tactile sensors, actuators, data collection, and model training into a replicable product will determine its ability to secure a core position in the dexterous manipulation and humanoid robot industry chain.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com