en.Wedoany.com Reported - Researchers at Leiden University in the Netherlands have successfully developed a type of micro-robot capable of swimming autonomously, sensing obstacles, and navigating complex environments. This entire process does not rely on sensors, software, or external control. Its intelligent behavior stems entirely from the interaction between the robot's physical form and its surrounding environment.
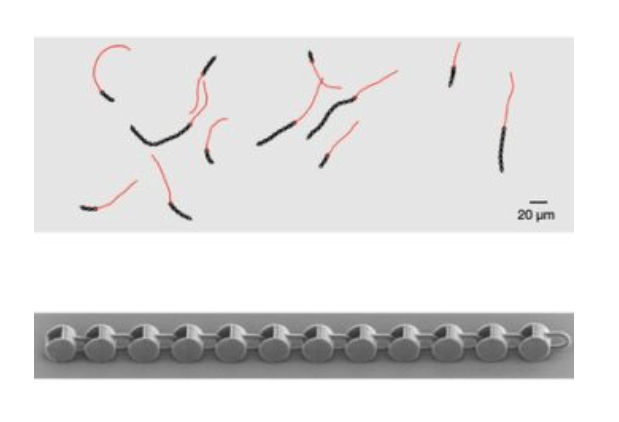
Professor Daniela Kraft from the Leiden Institute of Physics, together with postdoctoral researcher Mengshi Wei, designed this soft, chain-like micro-robot. It is constructed from flexible connecting segments and manufactured using Nanoscribe 3D micro-printing technology. Each structural element measures only 5 micrometers, with connecting rods as thin as 0.5 micrometers. The researchers state this is near the current limit of 3D printing technology. For comparison, a human hair is approximately 70 to 100 micrometers thick.
"Animals like worms and snakes constantly adjust their body shape while moving, which helps them navigate their environment," Kraft noted. "Macro-scale robots similarly utilize flexibility to achieve functionality. However, until now, micro-robots were either small and rigid or large and flexible. We explored the possibility of creating small yet flexible micro-robots in the lab." When activated by an electric field, this chain-like structure begins swimming at a speed of about 7 micrometers per second. The team observed a continuous cycle: the robot's shape influences its movement, and the movement, in turn, alters its shape. Ultimately, this results in lifelike responsiveness without any embedded electronic components.
"We discovered a continuous feedback loop between the robot's shape and its motion: the shape affects how it moves, and the motion in turn changes its shape," Kraft explained. "Therefore, this micro-robot can sense how the environment alters its body and react, making it behave like a living organism. This means we don't need micro-electronics to integrate intelligent capabilities." Wei added, "When the micro-robot encounters an obstacle, it automatically seeks an alternative route. When two robots meet, they naturally avoid each other."
The researchers point out that such micro-robots have potential applications in areas like targeted drug delivery, minimally invasive surgery, and diagnostics. Kraft emphasizes that the current primary task is to deeply understand their physical mechanisms. "We need to fully understand how this dynamic and functional behavior arises. This knowledge will aid in developing more advanced micro-robots and devices, and also contribute to a better understanding of the physics of biological micro-swimmers and organisms." This research has been published in the Proceedings of the National Academy of Sciences.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com