en.Wedoany.com Reported - On April 10, 2026, at the ceremony commemorating the 55th anniversary of Sino-US Ping-Pong Diplomacy, Zhiyuan Robotics, in collaboration with Peking University and the Beijing Academy of Artificial Intelligence, showcased a fully autonomous table tennis rally featuring the Lingxi X2 humanoid robot. According to a report by Science and Technology Daily on April 12, the core of this achievement stems from the SpikePingpong algorithm. The R&D team completed the entire development process from algorithm adaptation to system integration and debugging in just 10 days, and successfully deployed and demonstrated it on the Lingxi X2.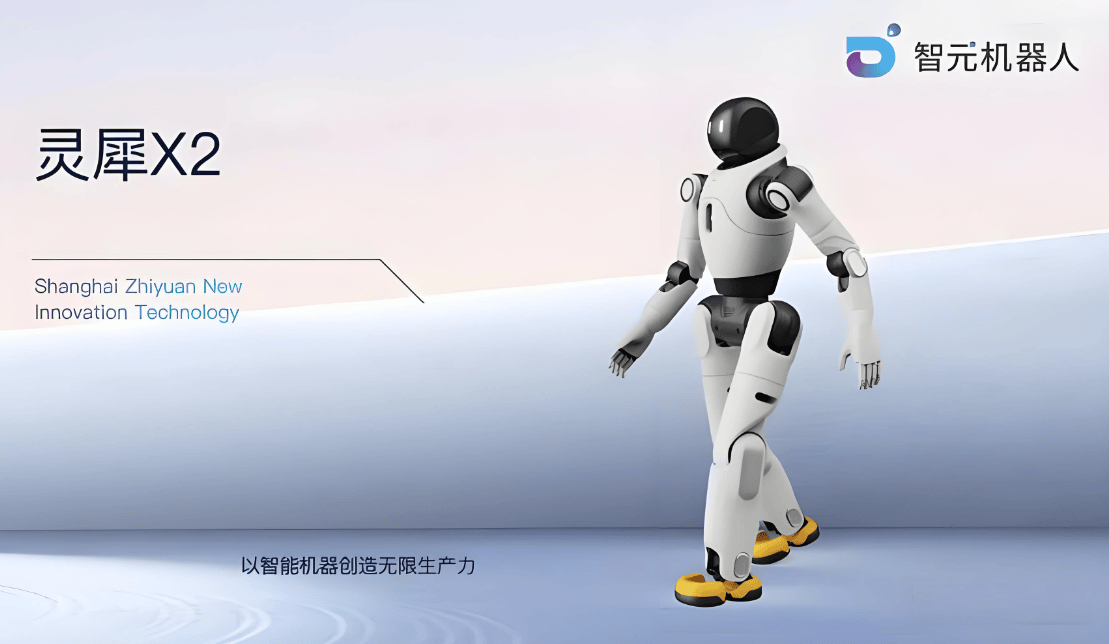
Table tennis, as a highly dynamic competitive sport, poses a triple challenge for robot perception, decision-making, and motion control: ball speeds exceeding 5 meters per second require sub-second reactions, trajectories are subject to physical interference like air resistance, and whole-body coordination must balance hitting accuracy with posture stability. The SpikePingpong algorithm innovatively integrates 20-kilohertz high-frequency pulse vision with imitation learning strategies to build an end-to-end motion control system. It is the world's first algorithm to apply pulse vision to humanoid robot table tennis control. The SONIC pulse perception module is based on the original pulse vision technology developed by Professor Huang Tiejun of Peking University. It captures the high-speed trajectory of the ping-pong ball using a high-frequency pulse camera, compensates for physical interference in real-time, and achieves millimeter-level accurate prediction of the racket contact point, improving response speed by 10 times compared to traditional vision solutions. The IMPACT strategy planning module employs an imitation learning framework, extracting hitting strategies from data on the movements of top human athletes. It achieves a 91% hit rate for a 30-centimeter target area and a 71% hit rate for a high-precision 20-centimeter area, representing a 37% to 38% improvement over previous state-of-the-art (SOTA) solutions. The perception-control fusion technology is deeply adapted to the Lingxi X2's 29-degree-of-freedom body and the Xyber-Edge cerebellum controller, achieving sub-millisecond command transmission from visual perception to joint execution.
The Lingxi X2, a bipedal humanoid robot independently developed in China, stands approximately 1.3 meters tall with 25 to 31 degrees of freedom throughout its body. It is equipped with high-precision sensors such as LiDAR and RGB-D cameras. Its fully self-developed hardware provides support for the algorithm: the Powerflow joint module delivers a peak torque output of 120 N·m, the Xyber-DCU domain controller ensures real-time processing of multimodal data, and the impact-resistant flexible materials combined with the 29-degree-of-freedom full-body design ensure motion stability and safety.
Zhang Shanghang, a researcher at the School of Computer Science, Peking University, and head of the Zhiyuan Embodied Large Model project, stated that from winning the Best Interaction Award at the World Humanoid Robot Games in 2025 with a desktop robotic arm playing table tennis, to now achieving smooth offensive and defensive play with a bipedal humanoid robot, this is not only a technological upgrade but also a practice of the "one brain, multiple forms" concept in embodied intelligence. The same set of motion algorithms can be adapted to different robot morphologies, providing possibilities for large-scale applications. Zhiyuan Robotics stated that it will continue to deepen research and development in embodied intelligence technology in collaboration with Peking University and the Zhiyuan Institute, driving the expansion of humanoid robot applications through the dual-driver approach of "body + AI".
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com