en.Wedoany.com Reported - GENISOM AI showcased its complete embodied intelligence ecosystem at ICRA 2026 in Vienna, centered around the GENISOM M1 quadruped robot, encompassing self-developed joint actuator modules, the MATRiX simulation infrastructure, the RoamerX autonomous navigation system, and the SomaMind AI agent framework.

ICRA is one of the world's premier conferences on robotics and automation, bringing together global researchers, engineers, and industry partners. For GENISOM AI, Vienna marked the company's first major exhibition at the conference, showcasing not a single product but a full product line spanning hardware and software. At the exhibition, GENISOM AI presented the GENISOM M1, L1, L1-W, and L1 EDU robot platforms, along with a robotic arm component and the self-developed CHAMP joint actuator module.
This provided attendees with the opportunity to experience end-to-end hardware and software components for development, ranging from individual actuators to fully autonomous robot systems.
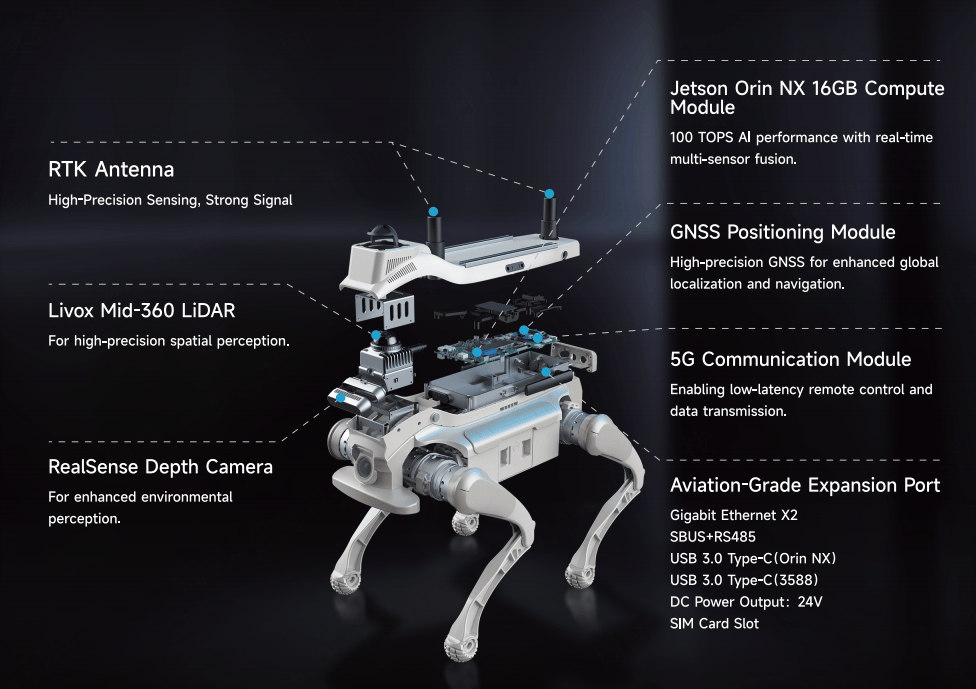
The GENISOM M1 quadruped robot was the main product highlight of the exhibition. Positioned as the industry's first lightweight, high-payload, fully-enclosed quadruped robot, it achieves a 1:1 payload-to-weight ratio and can continuously walk with a 30 kg load. It features an IP67 protection rating, operates in temperatures ranging from -20°C to 55°C, has a maximum wheeled speed of 8 m/s, can surmount obstacles up to 80 cm high, and handles a maximum climbing angle of 45 degrees. The GENISOM M1 is powered by the self-developed CHAMP P85MAX-S joint actuator module, delivering a peak torque of 180 N·m. Dual hot-swappable batteries provide up to five hours of runtime under no-load conditions, and 15 open interfaces support integration with external sensors, power systems, and control hardware. These specifications make it suitable for applications such as power grid inspection, industrial facility monitoring, emergency response, logistics, and security patrol.

On the software front, GENISOM AI demonstrated the MATRiX simulation platform, an open-source next-generation simulation environment that combines the MuJoCo physics engine with Unreal Engine 5, integrating native ROS2 interfaces for multi-sensor data streaming and algorithm interaction. Built on the REAL2SIM2REAL data flywheel, the platform supports seamless reuse of scene assets (such as 3D Gaussian splatting, generative Gaussian scenes, point clouds, and mesh models), reducing hardware trial-and-error costs and shortening the time from simulation to physical deployment. Developers can access MATRiX at https://github.com/zsibot/matrix. The RoamerX intelligent navigation platform integrates real-time LiDAR, IMU, and visual sensor mapping, achieving centimeter-level localization through a visual-LiDAR descriptor model with drift compensation, combined with spatiotemporal planning algorithms to generate efficient paths in dynamic environments—a solution validated in both simulation and public real-world demonstrations. The whole-body control framework enables quadrupedal robotic arms to simultaneously track body velocity and end-effector pose, with the policy trained in simulation via reinforcement learning and imitation learning before transfer to physical hardware. The SomaMind physical and interactive agent system connects high-level AI reasoning with physical robot execution through a behavior tree-based skill orchestration layer, decomposing complex user instructions into atomic skill sequences covering navigation, perception, manipulation, and communication, while allowing developers to extend the system by writing reusable skills on top of existing robot capability modules.
GENISOM AI's technology has been deployed in power grid inspection, security patrol, emergency rescue, logistics transportation, industrial workshop monitoring, and educational and research projects. The company has achieved a manufacturing and delivery milestone of 10,000 units on its quadruped robot platform. Its factory in Suzhou, China, operates automated assembly lines under a quality management system certified to ISO 9001, ISO 45001, and ISO 14001. A team from the University of Manchester used GENISOM AI hardware to secure first place at the IROS 2025 Quadruped Robot Challenge—one of the most rigorous benchmarks in legged robotics—validating the reliability of the robot system under pressure.

Founded in December 2023 and headquartered in Beijing, GENISOM AI is a full-stack embodied robotics company developing quadruped and humanoid robot platforms, while supporting partners across the robotics value chain through self-developed joint actuator modules, platform customization, ODM and production support, software toolchains, and secondary development resources. The company employs approximately 400 people, with about 70% dedicated to R&D, and has cumulatively produced and delivered over 10,000 units of its quadruped robot platform, with applications spanning industrial inspection, security patrol, emergency response, and research and education.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com