en.Wedoany.com Reported - On June 25, 2026, ACCESS announced the results of a remote robot control experiment using the VLA (Vision-Language-Action) model. The experiment confirmed that, through a high-quality communication network, certain tasks can achieve responsiveness and motion quality comparable to a local environment in a remote setting.
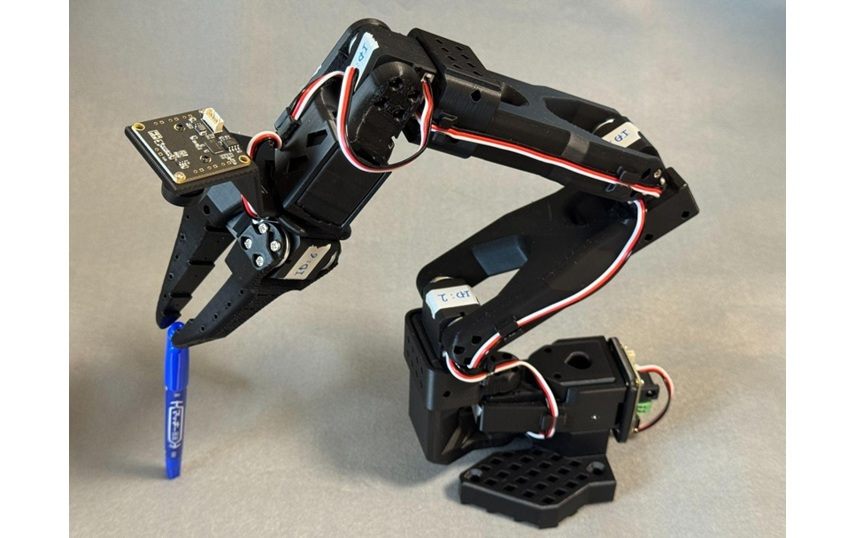
In the experiment, an inference server equipped with a self-learning VLA model was connected to a remote robot via a network to perform object pick and place tasks. The experiment compared the local environment (with the inference server placed nearby) with a remote connection using the high-quality optical network environment IOWN All-Photonics Network (APN). The construction of the IOWN APN environment was supported by NTT West.
The results showed that, in the remote environment using IOWN APN, certain tasks achieved robot control based on the VLA model comparable to the local environment. Compared to the local environment, tasks were executed stably, and the smoothness of robot movements was maintained. According to the disclosure, this method effectively suppresses the frequency of control delays and motion interruptions.
When using the VLA model for remote control, the cooperative processing of video acquisition, AI inference, and robot control makes it susceptible to communication latency and jitter. This experiment confirmed that, by using IOWN APN, real-time cooperation for certain tasks was achieved in a remote environment, thereby demonstrating that communication quality significantly impacts operability and work efficiency.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com