

Despite ongoing advancements in robotics, most existing robots still struggle to manipulate objects with the same dexterity and perceptual awareness as humans. This limitation hinders their performance in a wide range of real-world tasks, particularly in high-temperature environments such as steel mills and foundries, where extreme heat can degrade robot performance and reduce operational precision.
Recently, researchers at the University of Southern California (USC) developed a novel robotic hand called MOTIF (Multi-modal Observation based on Thermal, Inertial, and Force sensors), designed to significantly improve the object manipulation capabilities of humanoid robots. The innovation has been published as a preprint on the arXiv server.
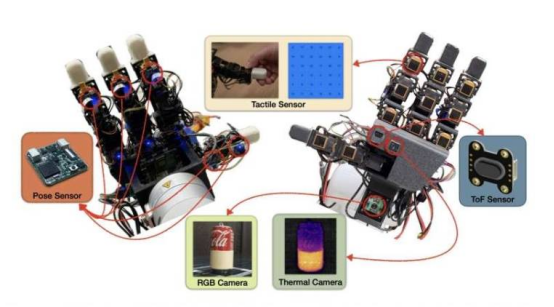
The MOTIF hand integrates a variety of sensing modalities, including tactile sensors, depth sensors, thermal cameras, inertial measurement unit (IMU) sensors, and vision sensors. According to team member Daniel Seita and colleagues, the research was motivated by the need for robotic manipulation that goes beyond traditional vision and touch sensing. Current multi-fingered robotic hands often lack the integrated perception required to perform complex tasks.
Inspired by the human hand, the MOTIF design aims to create a versatile, multi-modal robotic hand capable of safely and precisely handling objects. By leveraging a more comprehensive set of sensor inputs, the hand can perform fine-grained object interactions in diverse environments, including homes, factories, and other settings. The team initially found that many commercially available dexterous hands prioritize mechanical transmission structures over the rich sensing capabilities needed for their research, prompting them to seek a DIY-extensible hardware platform.
As an advanced robotic hand, MOTIF builds upon and extends the widely used LEAP Hand design by significantly enhancing its sensing capabilities. Key advantages include comprehensive environmental perception, the ability to safely handle hot objects, and the capacity to distinguish between visually similar objects with different physical properties.
To evaluate the potential of the MOTIF hand, the researchers conducted two laboratory experiments. The first experiment assessed the hand’s ability to grasp objects while taking their temperature into account, avoiding contact with overly hot regions. The second experiment used fingertip tapping actions to classify objects of identical shape but different weights (i.e., mass classification).
The results demonstrated that combining thermal sensing with 3D reconstruction effectively guides safe grasping, while inertial sensing enables precise mass classification of objects. In initial tests, the MOTIF hand performed excellently, safely grasping a variety of objects and accurately predicting their mass.
In the future, the MOTIF hand will undergo further improvements and be tested in a wider range of experiments to validate its potential in specific applications. Seita and his students believe the technology holds particular promise for handling manual tasks in home environments, professional kitchens, and industrial settings — such as cooking hot dishes, welding, or tightening screws — where it may outperform existing systems.
The team also plans to further enhance MOTIF by integrating higher-resolution fingertip sensors (such as the Digit 360) to provide more detailed tactile feedback. They are actively working on improving multi-modal sensing algorithms and exploring additional real-world applications.
Additionally, Professor Zhou revealed that the team presented this work last week at the ISER 2025 conference in Santa Fe, where they exchanged ideas with many outstanding researchers. They hope this work will inspire the academic community to explore more diverse sensing modalities in robotic manipulation research.