

In the field of high-end equipment manufacturing, although robotics has undergone decades of development, most existing robots still fall short of human-level flexibility and perception in object manipulation, limiting their performance in household tasks, disaster site cleanup, assembly and maintenance, and especially high-temperature environments such as steel mills and foundries. Recently, researchers at the University of Southern California achieved a major breakthrough by developing the MOTIF (Multimodal Observation based on Thermal, Inertial, and Force sensors) robotic hand, which is expected to change this status quo.
R&D Background: Limitations of Traditional Robotic Hands Spark Innovation
Current multi-fingered robotic hands generally lack integrated perception capabilities, making it difficult to perform complex tasks such as thermal perception and responsive contact feedback. Researchers Daniel Seita, Hanyang Zhou, Wenhao Liu, and Haozhe Lou noted that most commercially available dexterous hands focus primarily on mechanical transmission structures, with sensing capabilities insufficient to meet research needs. This prompted them to seek a hardware platform that allows DIY expansion, enabling modifications and improvements according to their own designs.
Innovation Highlights: Multimodal Sensor Integration for Comprehensive Upgrades
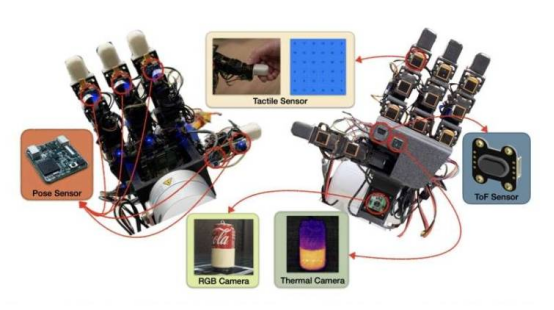
The MOTIF robotic hand is an advanced dexterous hand that integrates multiple sensing devices, including tactile sensors, depth sensors, thermal cameras, inertial measurement unit (IMU) sensors, and vision sensors. It builds upon the widely used LEAP hand design and offers several significant advantages:
Comprehensive environmental perception: Captures rich environmental information to provide a basis for precise manipulation.
Safe handling of high-temperature objects: Ensures safe operation in high-temperature working environments, avoiding performance and precision degradation due to heat.
Distinguishing similar objects: Identifies objects with similar appearances but different physical properties, improving manipulation accuracy and adaptability.
Experimental Validation: Outstanding Performance and Clear Potential
To evaluate the potential of the MOTIF robotic hand, the researchers conducted two laboratory experiments. The first assessed the hand’s ability to grasp objects while considering their temperature, avoiding contact with overheated areas. The second involved manipulating objects of the same shape but different weights, classifying their mass through fingertip tapping actions. Preliminary tests showed excellent performance, with the hand safely grasping various objects and accurately predicting mass. Results demonstrated that combining thermal sensing with 3D reconstruction effectively guides safe grasping, while inertial sensing enables precise mass classification.
Application Prospects: Broad Applicability and Promising Future
Seita and his students believe the MOTIF robotic hand has broad potential for handling manual tasks in household environments, professional kitchens, and industrial settings. In tasks such as cooking hot dishes, welding, or tightening screws, it outperforms existing systems thanks to its ability to safely handle high-temperature objects and perform precise operations.
Future Plans: Continuous Improvement and Expanded Applications
Looking ahead, the research team plans to further enhance the MOTIF robotic hand’s capabilities. On one hand, they aim to integrate higher-resolution fingertip sensors (such as Digit 360) for finer tactile feedback. On the other hand, they will improve multimodal sensing algorithms and explore applications in more complex real-world scenarios, including advanced hand manipulation tasks and environments with intricate thermal-force interactions.
Additionally, Professor Zhou revealed that the research team presented this work last week at the ISER 2025 conference in Santa Fe, exchanging ideas with numerous outstanding researchers and hoping to inspire the academic community to explore more sensing modalities. The development of the MOTIF robotic hand brings a new technological breakthrough and development direction to the field of high-end equipment manufacturing, poised to propel related industries to new heights.