en.Wedoany.com Reported - Visual Components, a Finnish company, has released version 5.1 of its factory simulation software, featuring high-precision physics simulation and scalable robot orchestration capabilities. It supports simulating the simultaneous operation of hundreds of autonomous mobile robots, automated guided vehicles, robots, products, and personnel within a complete factory environment.
Factories are currently evolving towards more autonomous, interconnected, and intelligent systems. When managing the complex interactions between robots, mobile vehicles, products, material flows, control systems, and personnel across the entire production environment, manufacturers face risks such as traffic bottlenecks, collision risks, commissioning delays, programming errors, inefficient layouts, and costly redesigns without effective pre-deployment validation.
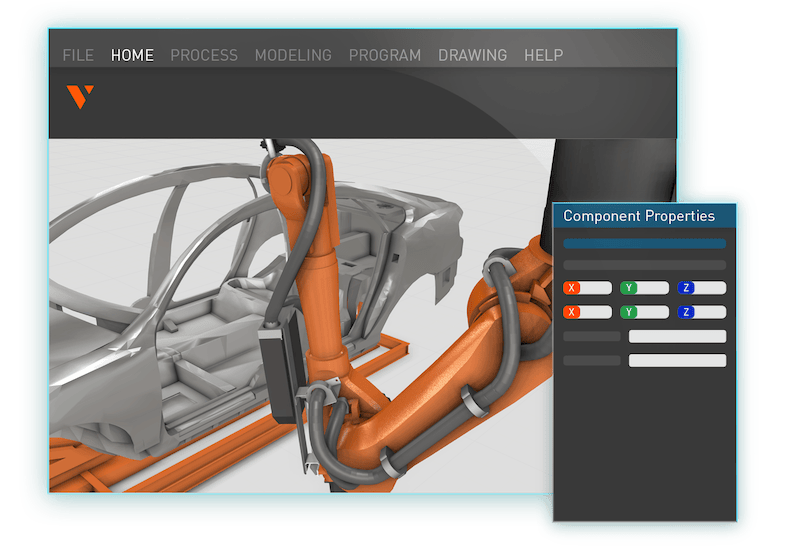
Visual Components 5.1 aims to help manufacturers simulate real-world physics, validate controller logic, and model dynamic factory operations at greater scale and accuracy before implementing changes in practice.
Mika Anttila, Chief Technology Officer of Visual Components, stated that manufacturers are under pressure to deploy more autonomous and flexible production systems, but existing tools are proving inadequate for handling complex environments. Customers need to validate interactions among hundreds of mobile resources, robots, vehicles, products, and personnel before installing any equipment. Version 5.1 offers a more scalable and realistic validation approach.
The new version delivers improvements in three areas. In simulation, it supports running hundreds of AMRs (Autonomous Mobile Robots) and AGVs (Automated Guided Vehicles) in the same environment with advanced collision avoidance capabilities, achieving up to 10 times better performance than previous versions, making validation of large-scale mobile robot scenarios a reality for the first time. In connectivity, it adds support for Allen-Bradley PLCs (Programmable Logic Controllers) and provides new virtual commissioning plugins for Nachi and Epson robots, allowing more real-world production systems to be integrated into the simulation loop early in the project. For robot offline programming teams, the scripting environment has been upgraded to Python 3, replacing the old environment that limited developers in building and maintaining robot programs.
These improvements enable production managers, factory planners, and automation engineers to validate more real-world systems, mobile fleets, control logic, and robot programs before committing resources. Unlike solutions focused on automating a single aspect, Visual Components 5.1 provides a comprehensive factory simulation platform for modeling the entire factory system—from robots and material flows to personnel operations—helping organizations make data-driven decisions before investing in physical systems, reducing reliance on assumptions and manual adjustments, and fostering collaboration between engineering, operations, and management teams, thereby achieving smoother commissioning and faster time-to-production.
These capabilities are particularly critical for manufacturers in the automotive, electronics, logistics, and healthcare sectors that are transitioning to more connected and autonomous production. These industries are combining traditional robot automation with mobile fleets and require controller-level precision validation to mitigate system commissioning risks.
Mikko Urho, Chief Executive Officer of Visual Components, stated that manufacturing environments are becoming increasingly dynamic. Mobile robots, automation, and interconnected production systems bring new opportunities and new complexities. Manufacturers need confidence that plans will work in practice before investing in or modifying factory sites. Visual Components 5.1 allows manufacturers to validate complex operations early in the planning process, reducing pre-deployment risks.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com