

The Italian Institute of Technology (IIT) has successfully demonstrated the first flight of iRonCub3, marking a milestone in humanoid robotics technology. iRonCub3 is the world's first jet-powered flying humanoid robot specifically designed for operation in real-world environments.
The research team investigated the complex aerodynamics of artificial bodies and developed advanced control models for systems composed of multiple interconnected components. The overall development of iRonCub3 (including actual flight testing) took approximately two years. In the latest experiments, the robot was able to lift off the ground by about 50 centimeters while maintaining stability. This achievement lays the foundation for a new generation of flying robots capable of operating in complex environments while retaining a humanoid structure.
A paper describing the aerodynamics and control research was published in the journal Communications Engineering.
This research was conducted in collaboration with robotics experts from IIT in Genoa, Italy; the team led by Alex Zanotti from the DAER Aerodynamics Laboratory at Politecnico di Milano (which conducted a series of comprehensive wind tunnel tests); and the team led by Gianluca Iaccarino from Stanford University, who used deep learning algorithms to identify aerodynamic models.
This robot flight demonstration represents the latest milestone of the Artificial and Mechanical Intelligence (AMI) Lab at IIT in Genoa, led by Daniele Pucci. Their research aims to push the boundaries of multi-modal humanoid robots, combining ground mobility and aerial maneuverability to develop robots capable of operating in unstructured and extreme environments.
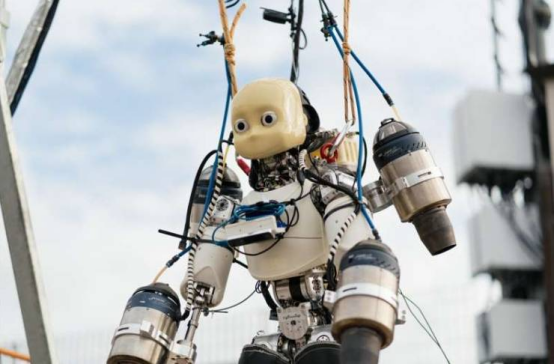
iRonCub3 is a technological upgrade of previous prototypes, based on the latest generation of the iCub humanoid robot (iCub3), designed for teleoperation. It integrates four jet engines: two mounted on the arms and two in a jet backpack on the robot's back.
To support the external engines, the iCub's hardware design required modifications, such as developing a new titanium alloy spine and adding heat-resistant shields. The robot, equipped with jet engines, weighs about 70kg, and the turbines can provide over 1,000 Newtons of maximum thrust. This configuration enables the robot to hover and perform controlled flight maneuvers even in the presence of wind disturbances or environmental uncertainties. Exhaust temperatures can reach up to 800 degrees Fahrenheit (approximately 477 degrees Celsius).
"This research is fundamentally different from traditional humanoid robotics, forcing us to achieve a substantive leap forward at the technological level," explained Daniele Pucci. "Here, thermodynamics plays a key role—the gases emitted by the turbines reach temperatures up to 700°C, with flow rates approaching the speed of sound. Aerodynamics must be assessed in real time, and the control system must handle both slow joint actuators and fast jet turbines simultaneously. Testing these robots is both exciting and dangerous, with no room for improvisation."
The AMI research team focused on the platform's dynamic balance, which is particularly complex due to the robot's humanoid morphology. Unlike structurally symmetric and compact traditional drones, iRonCub3 has an elongated shape, with mass distributed across movable limbs and a variable center of mass. This required the development of advanced flight balance models that account for the robot's multibody dynamics and the interactions between jet propulsion and limb movements.
Additionally, the movable limbs greatly increase aerodynamic complexity, as every movement of the robot's limbs alters the aerodynamics.
The researchers conducted extensive wind tunnel experiments, advanced computational fluid dynamics (CFD) simulations, and developed AI-based models capable of estimating aerodynamic forces in real time.
"Our models include neural networks trained on simulated and experimental data, integrated into the robot's control architecture to ensure stable flight," explained Antonello Paolino, first author of the paper and a PhD student in a joint program between IIT and the University of Naples, who spent a semester as a visiting researcher at Stanford University.
As a result, iRonCub3 is equipped with an AI control system that allows it to fly while handling high-speed turbulent airflows, extreme temperatures, and the complex dynamics of multi-body systems.
The advanced aerodynamic models developed by IIT demonstrate that posture and stability can be maintained even during non-stationary maneuvers (such as sequential engine ignition or changes in body geometry).
These studies can be transferred to other robots with unconventional morphologies, a unique situation compared to traditional drones, whose balance relies on symmetry and simplified control strategies that often overlook the robot's own aerodynamics and thermodynamics.
The final design of iRonCub3 is the result of an advanced co-design process specifically aimed at integrating AI and multiphysics into the design of flying robots. These technologies are innovative in the robotics field, enabling simultaneous optimization of the robot's form and control strategies while considering the complex interactions between aerodynamics, thermodynamics, and multibody dynamics.
We used co-design to determine the optimal positioning of the jet turbines to maximize controllability and stability during flight. We also employed advanced design techniques to manage heat dissipation generated by the engines, ensuring the robot maintains structural integrity even under extreme operating conditions.
The robot has been thoroughly redesigned to withstand the harsh conditions associated with aerial maneuvers and incorporates major improvements, focusing on precise actuation, enhanced thrust control through integrated sensors, and advanced planners for coordinated takeoff and landing.
Throughout the design process, we conducted multiple iterative adjustments based on results from advanced simulations and experimental tests, ultimately determining the robot's current configuration. This approach allowed the team to overcome the limitations of traditional methods, marking an important step forward in the automation and integrated design of complex robotic systems.
The first flight tests of iRonCub3 were conducted in IIT's small flight-testing area, where the robot was able to lift off the ground by about 50 centimeters. In the coming months, prototype testing will continue, and further refinement will be carried out through collaboration with Genoa Airport (Aeroporto di Genova). Genoa Airport will provide a dedicated area, set up and equipped by IIT in accordance with all necessary safety regulations. This area will be used for future experimental activities.
It is anticipated that flying humanoid robots like iRonCub3 will be applied in various scenarios in the future, such as search-and-rescue operations in disaster areas, inspections in dangerous or hard-to-reach environments, and exploration missions where both manipulation capabilities and aerial maneuverability are critical.