

Researchers have made significant progress in the field of soft robotics. Drawing inspiration from the grasping muscles of soft-bodied animals, the team successfully developed a low-pressure, muscle-like actuator. This innovation enables insect-scale soft robots to achieve autonomous crawling, swimming, and jumping in real-world environments, solving the long-standing challenge of balancing power and precision in micro-robots during autonomous movement.
Muscles, as soft tissues, generate motion through contraction and relaxation. Although insect muscles are small, they are remarkably powerful. An actuator is a device that converts mechanical energy into motion. In robotics, creating a miniature yet powerful actuator that is as flexible, precise, and elastic as biological muscle has been extremely challenging. Rigid motors currently used in robotic systems are limited by their susceptibility to damage and difficulty in miniaturization.
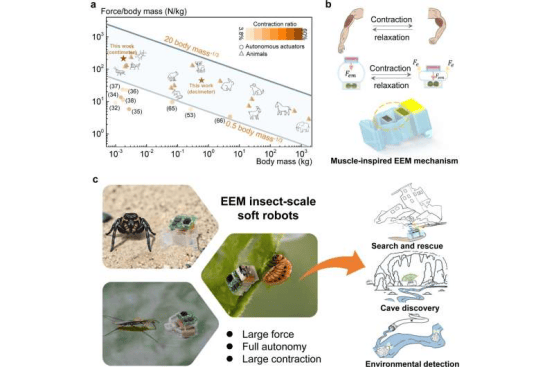
In a study published in the journal Nature, the research team described a method to overcome these challenges. They developed an electromagnetically inspired mechanism that mimics the grasping muscle system of soft-bodied animals by combining soft polymers (elastic materials) with coils of wire wound around small magnets. This system can maintain a bistable position without continuous power supply, similar to how soft-bodied animals keep their shells closed with extremely low energy consumption.
Durability is a notable advantage of this new technology. The actuator is made of flexible materials and can withstand millions of cycles of motion, as well as drops from heights of up to 30 meters.
To test the actuator's performance, the research team built several insect-sized soft robots. These robots successfully performed autonomous crawling, swimming, and jumping tests on various environments and surfaces, including rough rocks, soil, and glass. Some robots were required to complete obstacle training while performing sensing operations, while swimming robots were tested in both laboratory settings and rivers. The successful tests highlight the actuator's versatility and strength, creating possibilities for numerous potential applications.
The researchers stated that this muscle-inspired electromagnetic mechanism expands the autonomy and functional capabilities of small soft robots through elastic structural changes, with potential applications in rescue operations and critical signal detection. These micro-robots could be deployed in search and rescue missions to inspect dangerous or hard-to-reach areas for humans, and they also hold potential for cave exploration and the development of minimally invasive medical tools.