en.Wedoany.com Reported - Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences have developed a 3D-printing technique that can produce flexible filaments capable of bending, twisting, expanding, or contracting when heated or cooled.
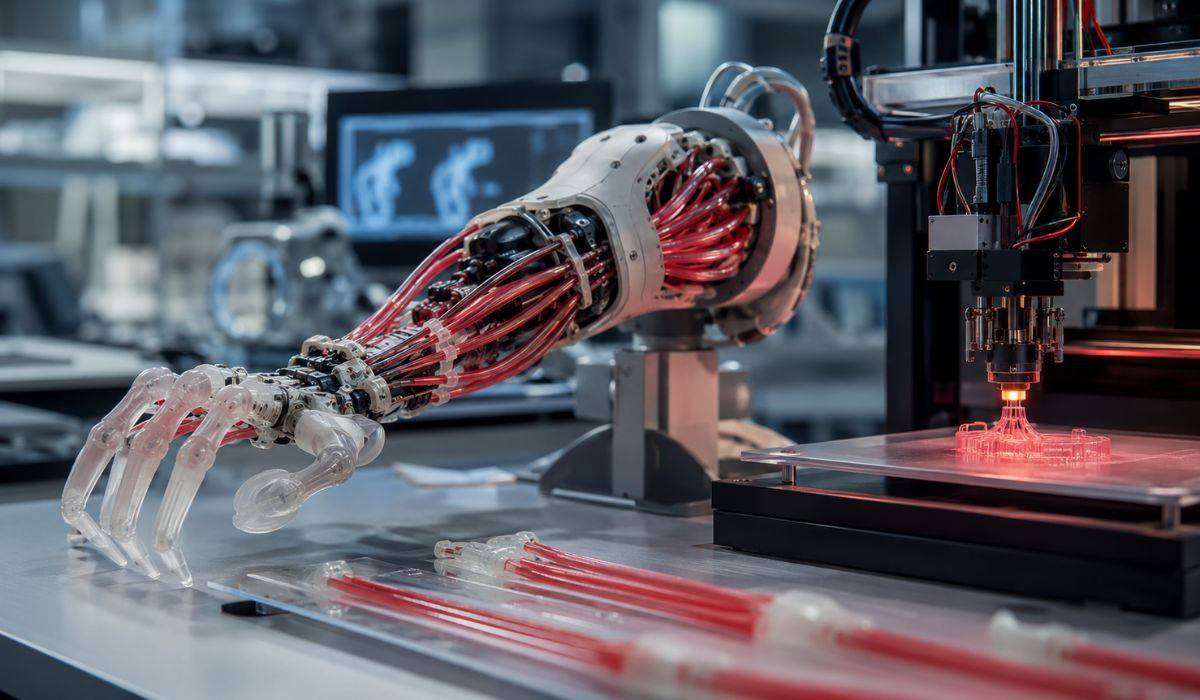
The method allows active and passive materials to be arranged within the same structure, so that part of the motion is determined during the manufacturing stage. The research, published in the Proceedings of the National Academy of Sciences, describes a strategy called multi-material rotational 3D printing. The process uses a printhead that rotates while depositing different materials, thereby controlling the internal composition of the fiber-like filaments. According to the authors, this architecture influences how each component responds to thermal stimuli. The approach is based on flexible structures observed in living organisms—the researchers cite examples such as proteins, plant tendrils, octopus tentacles, and elephant trunks, which can bend, curl, or assume different shapes depending on their internal organization and biological function.
Traditional robots use electric motors, pneumatic systems, hydraulic components, and mechanical joints to perform tasks. These capabilities are widely applied in industry but do not always provide the flexibility needed to manipulate fragile objects or operate in non-standardized environments. Soft robotics, as an alternative pathway, investigates materials that can change shape, distribute forces, and adapt to contact with irregular surfaces. Applications include flexible grippers, medical devices, filtration systems, reconfigurable structures, and robotic components that need to interact with objects of varying sizes. The idea of developing artificial muscles for robots has been studied for years. The field includes pneumatic approaches, shape-memory alloys, electrically driven polymers, magnetic materials, and cable systems that function like tendons. Each approach has its own emphasis, but there are technical limitations—for instance, pneumatic systems rely on compressors and hoses, some polymers require high voltage, and some materials have slow response times or manufacturing constraints.
In the Harvard study, the researchers combined two types of elastomers: the active material is a liquid crystal elastomer (LCE) that contracts along a preferred direction under specific temperature changes; the passive material resists deformation. When the two materials are printed side by side, the difference in physical response generates motion: the active part contracts while the passive part maintains greater stability, causing the filament to bend, twist, curl, or move according to the internal distribution defined during printing. The rotating printhead used in the process adds a second control variable, orienting the molecular alignment of the liquid crystal elastomer into helical patterns. This allows the researchers to change the direction and intensity of bending and twisting at different points in the structure—a feature that distinguishes this technique from methods based solely on the external shape of the part. According to the authors, the programming of motion occurs within the filament itself, without the need to add gears, rigid hinges, or mechanisms after printing.
The team tested wavy filaments and planar networks composed of repeating small units. Visually similar structures exhibited different behaviors when heated—some contracted while others expanded, depending on the location of the active material within each filament. The researchers also produced networks capable of transforming from a flat shape into a three-dimensional configuration, such as a dome-like structure. Another demonstration showcased an active filter whose pore openings change with temperature: allowing particles to pass when heated and reducing the openings when cooled. The study also describes a soft gripper fabricated using the same logic, designed to descend over an object, close around it, lift the item, and then release it. According to the Harvard announcement, the demonstration suggests possible uses in robotic manipulation, particularly in systems that require a combination of deformation and contact with various surfaces. These results remain at the experimental stage, with no indication that the technology is ready to replace electric motors, industrial actuators, or robotic systems used for high-power applications.
It is important to note that the term "muscle" should be understood here as a functional analogy, not as an equivalence to human tissue. Biological muscle involves fibers, nerve signals, blood supply, cellular metabolism, and control coordinated by the nervous system; the motion of the printed filaments, by contrast, is generated through the response of synthetic materials to temperature changes. While they exhibit contraction, twisting, and bending capabilities, the physical mechanism differs from that of biological muscle. Thermal actuation is one of the main limitations indicated by the nature of the experiment itself—motion depends on heating and cooling, and factors such as response time, energy consumption, and temperature control must be considered before applications outside the laboratory. Another issue is the scale of use. The demonstrations show that multi-material rotational 3D printing can produce filaments and networks with programmable motion, but no timeline for commercial application has been established. The authors point to possible applications in adaptive robotic grippers, active filters, biomedical devices, reconfigurable valves, and on-demand shape-morphing structures. These remain research pathways rather than ready-made products, requiring subsequent work such as durability testing, cyclic repetition, safety verification, and compatibility with control systems.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com