

In the field of robot development, finding suitable ROS (Robot Operating System) packages has long been a challenge. Faced with over 7,500 options, traditional keyword searches often return a large number of irrelevant results, wasting developers' time and energy. Recently, researchers from the National University of Defense Technology (NUDT) and Zhejiang University have delivered an innovative achievement, providing an efficient solution to this problem.
The study was published in the Journal of Frontiers of Computer Science. The new tool developed by the researchers abandons simple word matching, instead using "knowledge graph" technology to add detailed tags to each software package, covering aspects such as compatible robot types, supported sensors, and functions, thereby building a meticulously organized index.
In head-to-head tests, this semantic-driven search method performed exceptionally well, with accuracy at least 21% higher than popular methods such as GitHub, Google (limited to ROS or GitHub), ROS Index, and even ChatGPT. Lead researcher Professor Mao Xinjun stated: "With this semantic-driven approach, developers can find the right ROS components in seconds, rather than hours as before."
This smarter search method holds significant importance for robot development. Faster and more accurate searches allow developers to devote more time to building compelling robots, whether for warehouse automation systems, medical assistants, or interactive museum guides. At the same time, intelligent search tools can proactively recommend suitable drivers or algorithms, avoiding compatibility issues, reducing errors, optimizing testing processes, and ultimately improving robot performance.
In the long term, as more teams share and reuse reliable open-source software packages, the entire robotics community will benefit, accelerating progress. For funding agencies and policymakers envisioning a robotics-powered future—from self-driving delivery bots to eldercare companions—modest investments in "semantic infrastructure" will yield massive returns.
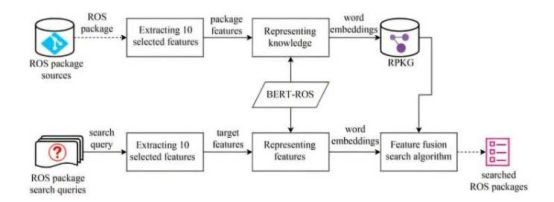
The research team constructed a "ROS Package Knowledge Graph" connecting over 7,500 packages to more than 32,000 detailed attributes. To ensure search accuracy, they trained a specialized language model to accurately interpret robot-specific terminology and conducted head-to-head comparisons with existing methods, where the new approach improved the probability of placing the correct software package at the top of results by at least 21%.
In building the "index," the researchers collected information from the ROS wiki and GitHub repositories, using rule-based and fuzzy matching techniques to extract structured details, including package categories, supported hardware, and functions. They then fine-tuned the language model to accurately recognize terms like "RPLIDAR" or "Gazebo." Finally, a search algorithm was developed to rank packages based on the number of matching tags with the query, avoiding the hassle of browsing irrelevant results.
As robots increasingly integrate into daily life, this semantic search engine will help developers achieve seamless, error-free development, propelling robotics technology to new heights.