en.Wedoany.com Reported - A research team led by Professor Hu Qingsong from China University of Mining and Technology (CUMT) proposed an innovative perception scheme integrating Ultra-Wideband (UWB) positioning and LiDAR point cloud technology in a paper published in the June 2026 issue of Industry and Mine Automation (No. 4). The scheme, utilizing the UWB-PU-VGAT detection network, achieves a mine car detection accuracy of 90.23% and a frame rate of up to 32.3 fps for underground unmanned vehicles, significantly enhancing the safety and real-time performance of mine autonomous driving. This provides key technical support for the construction of smart mines.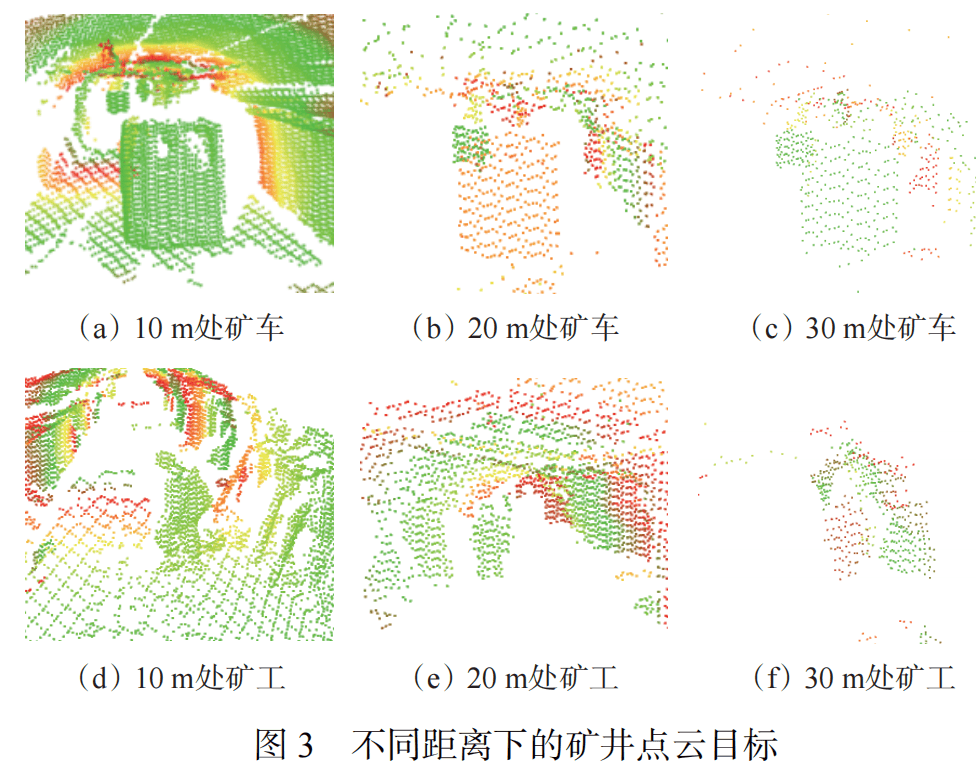
Addressing industry pain points such as poor lighting conditions due to dim and dusty underground tunnels, low effective target ratios, and sparse long-distance point clouds, the team started from the algorithmic foundation and successfully developed an improved Voxel-based Graph Attention Network (VGAT). This network, through feature enhancement and compensation modules, deeply mines the spatial positional relationships within point clouds. By combining the graph attention mechanism with Focal Loss to optimize the loss function, it effectively solves the persistent problems of severe imbalance between positive and negative samples and high long-distance detection errors. In tests using only LiDAR, the VGAT network achieved average detection precisions of 83.17% for mine cars and 78.54% for miners, surpassing several mainstream algorithms in overall accuracy.
To further overcome the challenge of long-distance recognition, the team cleverly utilized the UWB positioning system already widely deployed in mines. The system uses real-time positions provided by UWB as prior information to delineate target areas, automatically cropping LiDAR point clouds to filter out invalid background data, thereby significantly reducing the recognition range and computational load. Simultaneously, to address the issue of sparse long-distance point clouds, the network incorporates a point cloud upsampling technique (Grad-PU), capable of performing 4x completion and reconstruction of incomplete point clouds from over 30 meters away, transforming sparse point clouds into high-density, complete ones, allowing distant miners and mine cars to be clearly "visualized."
The technology was field-tested at the Wuzhuang Iron Mine of Xuzhou Iron and Steel Group. As an underground mine with an annual output of 500,000 tons of iron ore, Wuzhuang Iron Mine has been continuously promoting intelligent transformation through "replacing manpower with mechanization and reducing manpower with automation." Test data show that the UWB-PU-VGAT network achieved an average detection precision of 90.23% for mine cars and 83.67% for miners, a 6.09% improvement over the baseline network. Its frame rate reaches 32.3 fps, far exceeding the real-time requirement of 10 to 30 fps for underground unmanned driving. It can flexibly adapt to various tunnel forms, including straight, branching, and curved tunnels, and can stably identify targets under partial occlusion conditions.
Professor Hu Qingsong, a doctoral supervisor at CUMT, has long focused on core technologies in the field of mine intelligence, including precise positioning, vehicular network communication, and multimodal perception. He has led projects funded by the National Natural Science Foundation of China (General Program). The emergence of this team's technical achievement is expected to provide new solutions to the long-standing environmental perception challenges in the field of underground unmanned driving.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com