en.Wedoany.com Reported - Researchers at Harvard's John A. Paulson School of Engineering and Applied Sciences have developed a 3D printing method to create fibers thinner than a human hair. These fibers can bend, twist, expand, or contract in response to temperature changes, functioning as programmable artificial muscles. The findings were published in the Proceedings of the National Academy of Sciences, with research led by the lab of Jennifer Lewis, Hansjörg Wyss Professor of Biologically Inspired Engineering, and postdoctoral fellow Mustafa Abdelrahman as the first author.
The technology is based on a rotational multimaterial 3D printing platform developed in the Lewis lab. The platform extrudes two materials simultaneously through a rotating nozzle: a liquid crystal elastomer, an active material that contracts along a preferred molecular direction when heated, and an inert soft elastomer that maintains its shape regardless of temperature. By precisely controlling the position of each material in the fiber's cross-section and rotating the nozzle during printing, the researchers can directly write helical molecular alignment into the fiber as it forms, fully presetting the shape-changing behavior during manufacturing without the need for post-processing or manual assembly.
"I saw this very beautiful rotational 3D printing platform and thought: if we add active materials and pattern them into the fiber, can we use that to drive shape change?" said Abdelrahman.
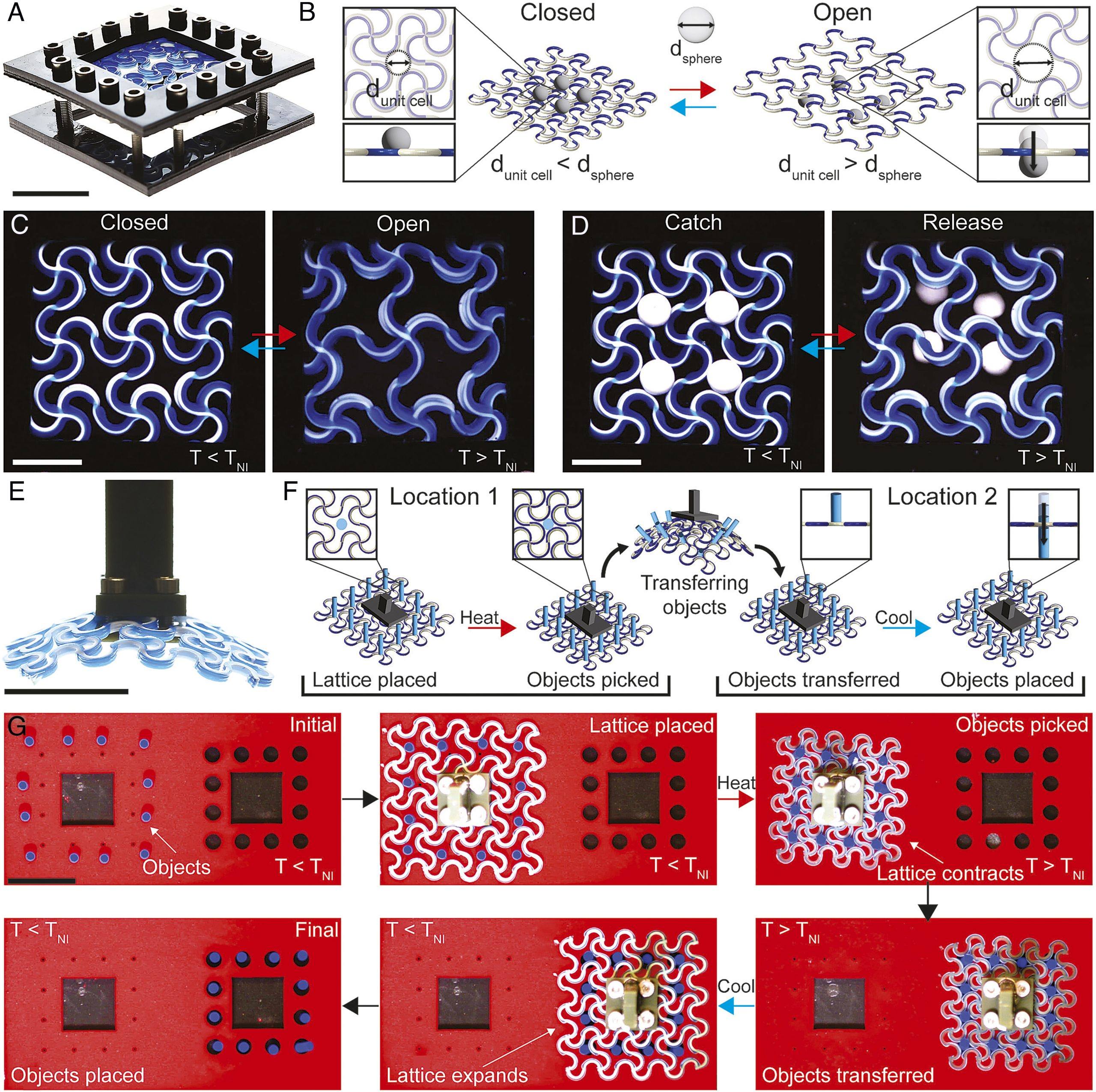
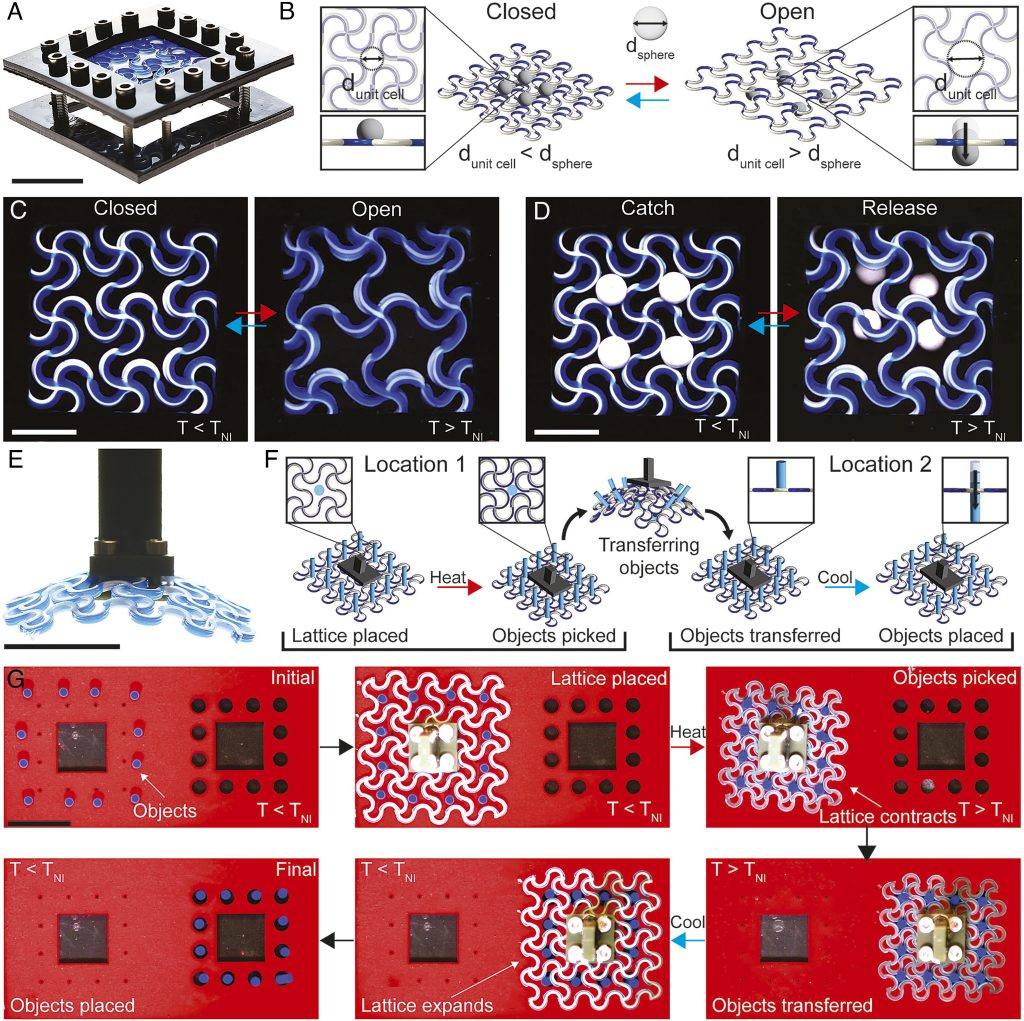
The potential of the technology was demonstrated when the team used individually programmed fibers as building blocks for more complex architectures. Sinusoidal or wavy fibers appear visually identical but exhibit opposite behaviors depending on the position of the active material: when the elastomer is on the outer side of the wave, the fiber straightens and expands; when on the inner side, it tightens and contracts.
Using these units, the researchers assembled planar lattices that open and close with heat, functioning like active filters: allowing particles to pass when heated and capturing them when cooled. The lattice also served as a pick-and-place gripper, lifting multiple rods simultaneously and releasing them on demand. A lattice with alternating expansion and contraction regions transformed into a dome-shaped structure upon heating, closely matching computer-predicted simulations. Validation and modeling were conducted in collaboration with Professor L. Mahadevan, an expert in the mechanics of natural structures, while molecular alignment was characterized using X-ray scattering at Brookhaven National Laboratory in collaboration with Professor Joanna Aizenberg's lab.
The team has printed fibers as small as 100 micrometers in diameter and believes there is room for further miniaturization. "In terms of scalability, we can fabricate more complex nozzles in the future, integrating other materials—for example, adding liquid metal channels for actuation or integrating other functionalities," said graduate student and co-author Jackson Wilt.
The team envisions applications including reconfigurable soft grippers, tunable filters and valves, as well as injectable fibers that lock into place in the body to form porous, clot-promoting structures for biomedical use. As Lewis stated: "This fiber design and printing framework can accelerate the transition of artificial muscle-like materials from the lab to real-world technologies."
The Harvard team also identified the boundaries of the current system. Miniaturization is a direct constraint: nozzle resolution is limited by the DLP resin printer used to fabricate custom co-extrusion dies, restricting feature sizes to approximately 50 micrometers. Reducing the nozzle diameter from 1 mm to 0.5 mm successfully decreased fiber diameter from 600 micrometers to 300 micrometers, but at the cost of lower printing speeds at smaller scales, which reduced shear-induced molecular alignment of the liquid crystal elastomer. Since molecular alignment is the source of actuation, there is a direct trade-off between miniaturization and performance.
Temperature dependence is another practical constraint. All actuation relies on heating the sample above the nematic-to-isotropic transition temperature of the liquid crystal elastomer, which, in the current ink formulation, is well above ambient conditions. Demonstrations involved immersing the lattice in a heated silicone oil bath—a setup far removed from the untethered, body-integrated, or ambient-condition environments required for soft robotics and biomedical applications.
Contributing authors to the study include Yeonsu Jung, Rodrigo Telles, Gurminder K. Paink, and Natalie M. Larson. Funding was provided by the National Science Foundation through the Harvard Materials Research Science and Engineering Center and the Army Research Office Multidisciplinary University Research Initiative. Experimental work was conducted at the Harvard Center for Nanoscale Systems and the Brookhaven National Laboratory Synchrotron Light Source, supported by NSF and the Department of Energy, respectively. The Harvard Office of Technology Development has initiated intellectual property protection for this foundational innovation and is exploring pathways to bring it to market.
This latest achievement from the Lewis lab is part of Harvard's research trajectory in programmable soft materials. An earlier study from the group, led by Jackson Wilt and former postdoctoral fellow Natalie Larson, used the same rotational multimaterial 3D printing platform to fabricate soft robotic structures with embedded actuation pathways, pointing toward applications in surgical robotics and human-assistive technologies. Lewis and Princeton University faculty member Emily Davidson refined the science of liquid crystal orientation during extrusion-based 3D printing, transforming the process from an experimental art into a more precise, measurable discipline, laying the foundation for large-scale reliable manufacturing of liquid crystal elastomer-based materials. Liquid crystal elastomers are now attracting attention in soft robotics, energy damping, and biomedical engineering. The ability to pre-program fiber shape changes during printing removes a key barrier to translating lab results into usable devices.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com