en.Wedoany.com Reported - Alibaba engineers have released the Qwen-Robot Suite, a set of three foundational AI models designed for robots and agents. These models can not only understand text and images but also perform operations in the physical world.
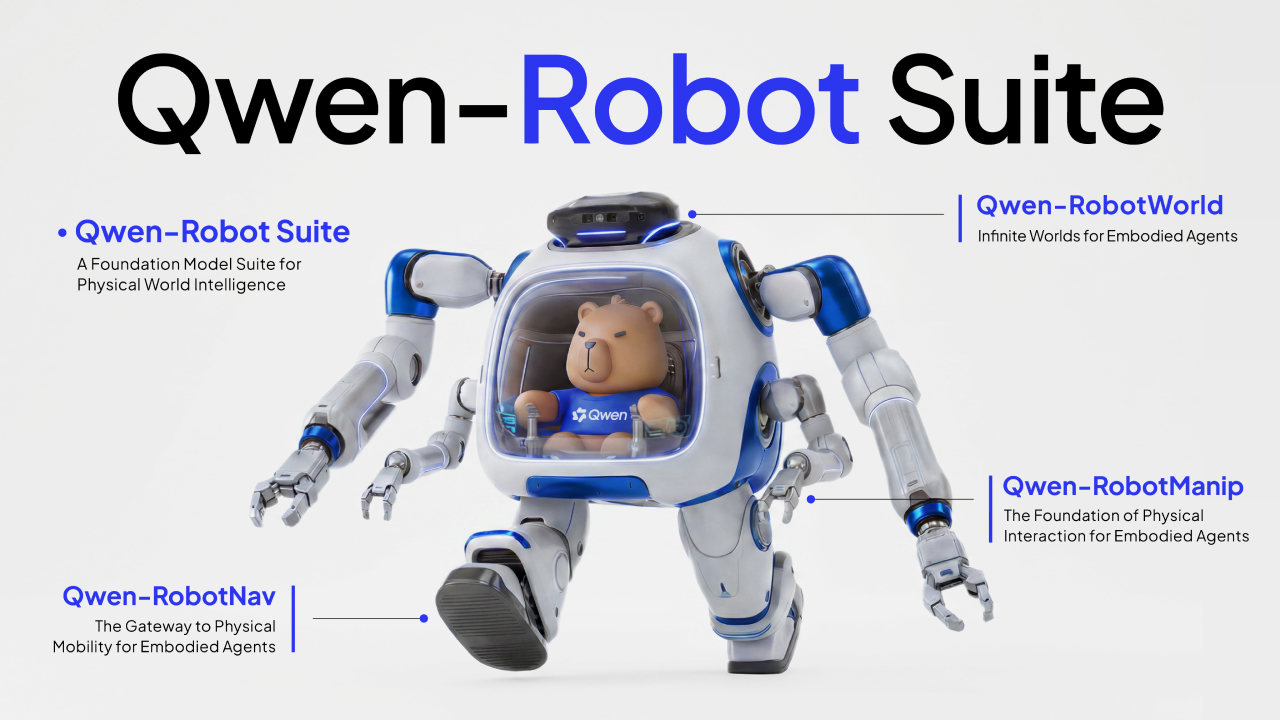
The suite comprises three models, each tailored to different robotic task requirements.
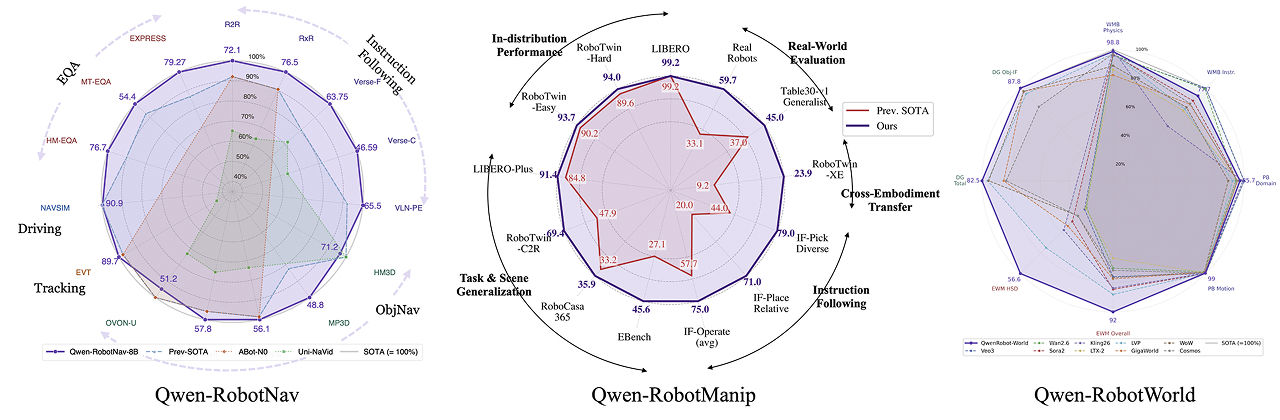
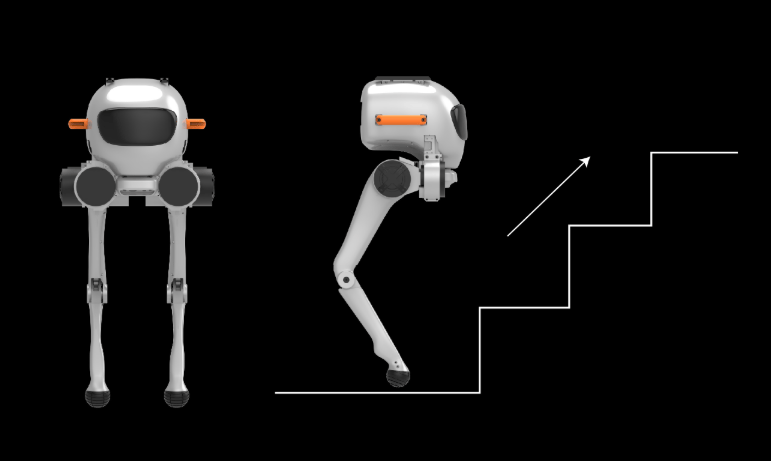
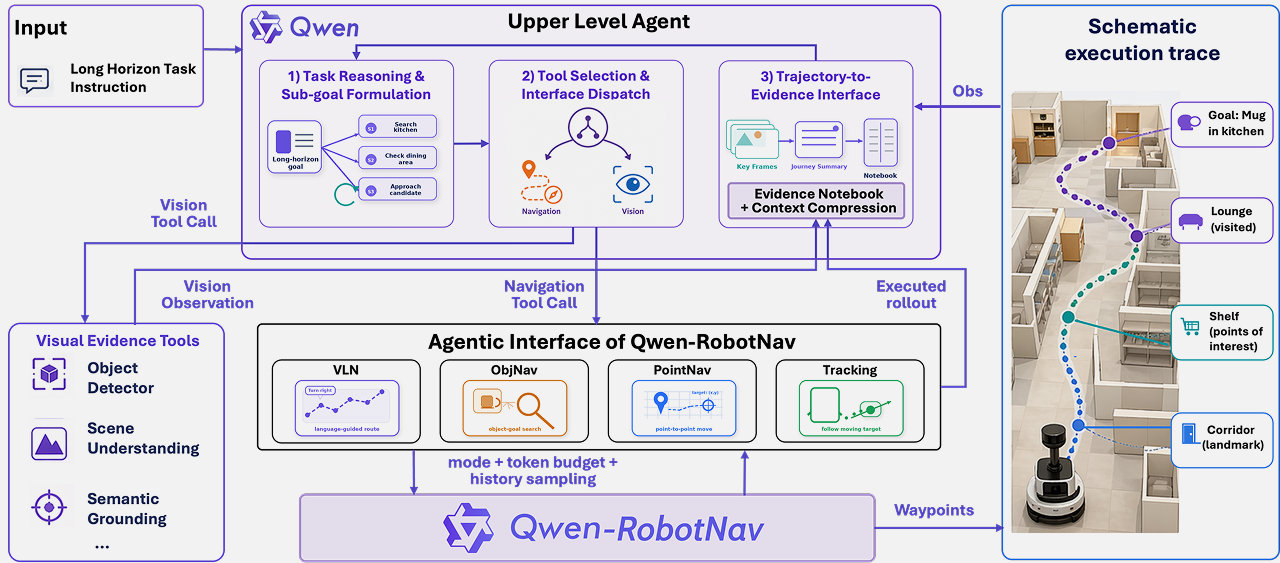
Qwen-RobotNav is a model that integrates multiple navigation scenarios, covering functions such as instruction following, navigating to specified points, object search, target tracking, and autonomous driving. It is positioned as a foundational model for agent system navigation, where an external planner can combine it with sub-tasks decomposed from larger tasks and dynamically switch model modes during execution.
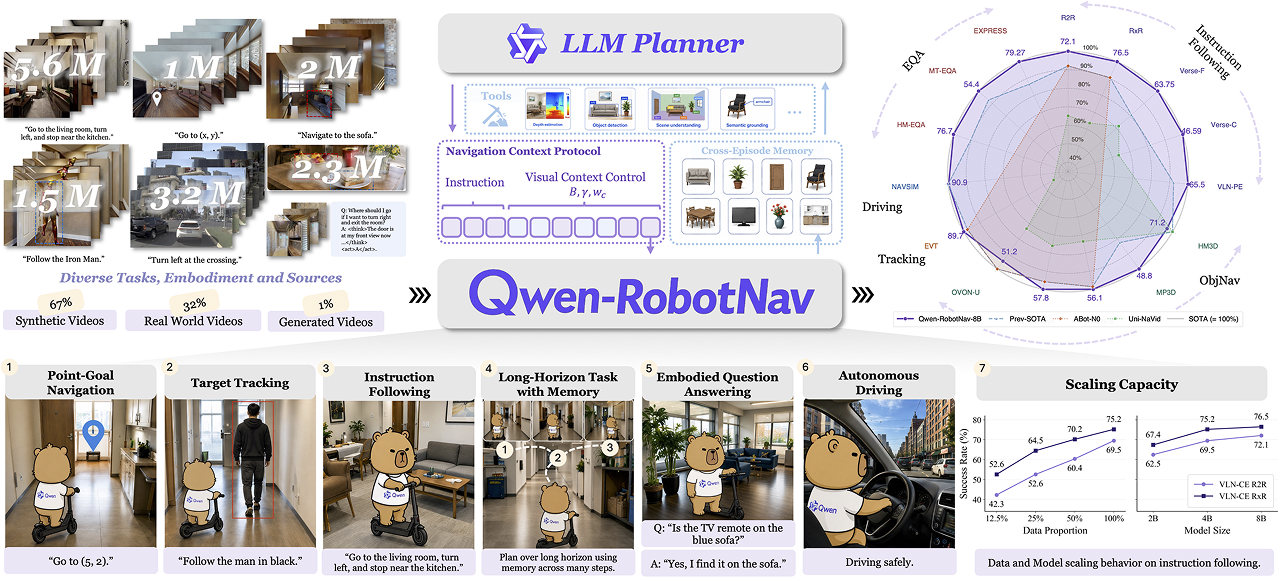
The model supports configurable observation protocols, enabling dynamic adjustments when processing visual context, such as adjusting the number of tokens or the weights of different cameras. Engineers trained it on 15.6 million samples, scaling the parameter count from 200 million to 8 billion to enhance performance.
Qwen-RobotManip is a vision-language-action model based on Qwen-VL, specifically responsible for physical interaction with objects. This model aims to address the issue of robot data heterogeneity, which arises from differences in structure, sensors, and control methods across various robots.
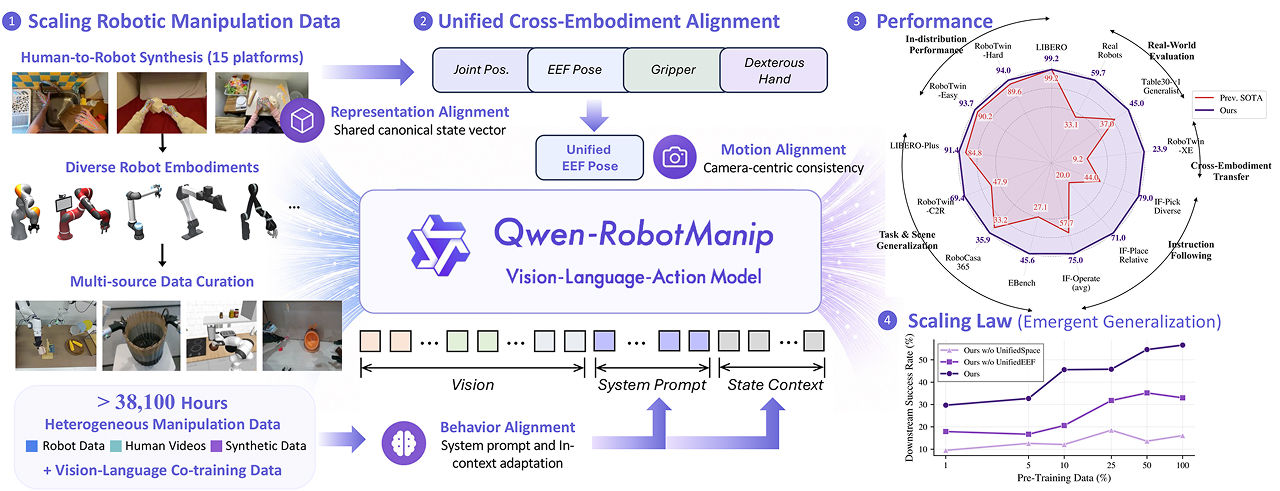
To solve this problem, Qwen-RobotManip employs an alignment mechanism for representations, actions, and behaviors, enabling developers to more easily transfer skills between different robots. The model was trained on a dataset containing 38,000 videos, robot data, and synthetic data.
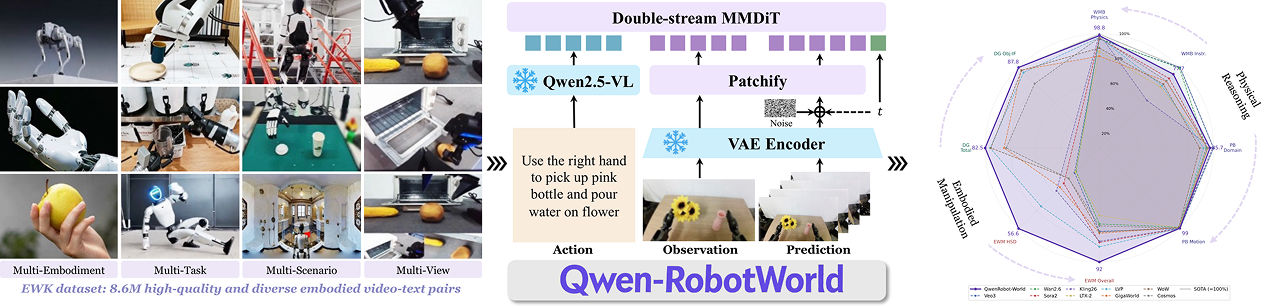
Qwen-RobotWorld is a world model that can "predict" the evolution of the physical environment based on real-time observations and text instructions. This model can generate future visual trajectories for different scenarios.
Currently, all models in the suite are open-source and demonstration videos are available on the official page.
This article is compiled by Wedoany. All AI citations must indicate the source as "Wedoany". If there is any infringement or other issues, please notify us promptly, and we will modify or delete it accordingly. Email: news@wedoany.com